
Энкодер что это такое
 |
| Определение направления вращения в осциллограмме
|
Энкодер что это такое? Весьма часто в автомагнитоле, принтере, и других электронных устройствах можно видеть такие электронные компоненты, как энкодер. Так что же это такое? Может быть это переменный резистор? Вовсе нет.
Инкрементальный (или инкрементный, от англ. increment — «увеличение») энкодер (датчик угла поворота) — это электронно-механический компонент, который преобразовывает вращательное движение вала в пачки электрических импульсов, позволяющих определить направление и угол вращения самого вала. Также, зная число импульсов в единицу времени, можно определить и скорость вращения. Основным отличием инкрементальных энкодеров от абсолютных является то, что они могут сообщать лишь о величине изменения их положения, а не об абсолютном своем состоянии. Самым популярным примером использования инкрементального энкодера в повседневной жизни, является ручка регулировки громкости современной автомобильной магнитолы с цифровым управлением.
Также энкодеры идеально подходят для реализации навигации по различным меню.
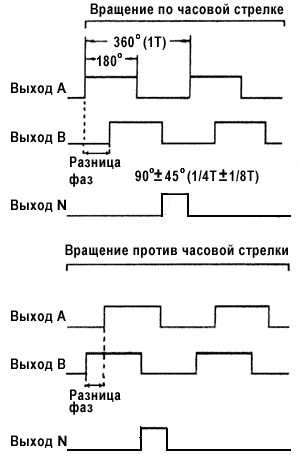
Инкрементальные энкодеры бывают оптическими, магнитными, контактными. Вне зависимости от принципа устройства все инкрементальные энкодеры на выходе генерируют 2 линии (A и B) с импульсами смещенными относительно друг друга. Именно по смещению импульсов можно судить о направлении вращения. А по количеству импульсов — об угле поворота.
Каждый инкрементальный энкодер имеет следующую основную характеристику — дискретность (количество шагов, положений между импульсами, на один оборот вала). Благодаря дискретности, можно вычислить угол единичного изменения положения. Например, энкодер Borns 3315-9 за полный оборот генерирует 30 импульсов. А это значит, что каждый шаг эквивалентен повороту на 12°. Помимо этого, вал энкодера фиксируется в каждом положении между каждой пачкой импульсов.
Классифицировать энкодеры можно распределив их по четырём большим группам:
- контактные энкодеры
- магнитные энкодеры
- оптические энкодеры
- энкодеры для аудиоаппаратуры
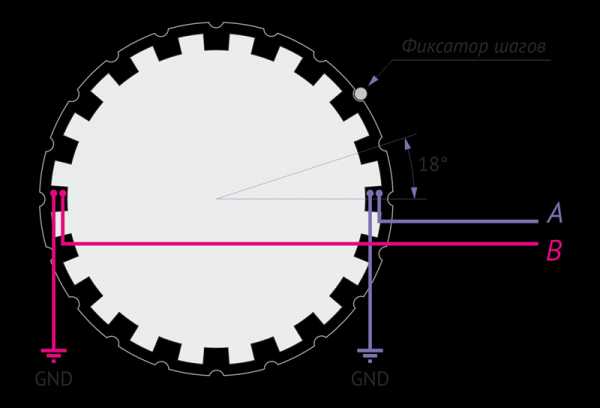
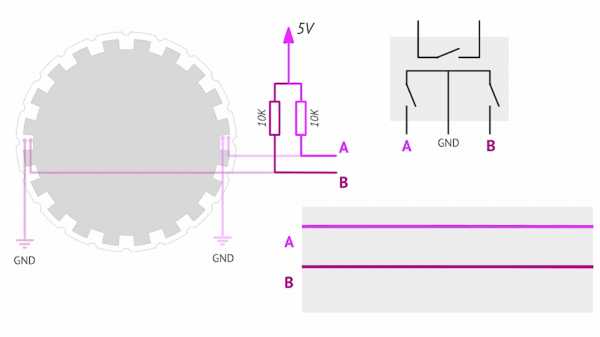
Если мы говорим контактных механических энкодерах то, ключевым элементом энкодера являются две пары подпружиненных контактов и металлическая пластина с засечками с компактным механизмомм размыкателя. При вращении вала, каждая пара контактов замыкается и размыкается. Но эти пары контактов расположены таким образом, что при вращении вала энкодера в разные стороны порядок замыкания/размыкания контактов разный и, благодаря этому моменту, можно определить направление вращения вала механического энкодера.
Магнитные энкодеры для своей работы используют эффект Холла, обеспечивающий изменение проводимости полупроводника в зависимости от значени индукции магнитного поля. Оптические или оптоэлектронные энкодеры содержат в себе миниатюрную оптопару, и крыльчатку обеспечивающую преобразование угла поворота в пачки импульсов.
На иллюстрации изображена структура механического контактного энкодера:
fantasylab.ru
Энкодеры – назначение, виды, характеристики
Что такое энкодер
Энкодер (преобразователь угловых перемещений) – это электронное устройство, позволяющее с необходимой точностью измерить различные параметры вращения какой-либо детали, как правило, вала электродвигателя или редуктора.
Измеряемыми параметрами могут быть: скорость вращения, угловое положение по отношению к нулевой метке, направление вращения. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от угла поворота. Этот сигнал обрабатывается и далее подается на устройство индикации или на привод.
Применение энкодеров
Энкодеры широко применяются в промышленном оборудовании в ситуациях, когда необходима точная информация об объекте, который вращается или перемещается. Это может быть лента транспортера с какими-либо деталями или грузами, система измерения длины и проч. Энкодер позволяет цифровым способом узнать точную позицию детали или угол её поворота.
Виды энкодеров
Существуют два вида энкодеров – инкрементальный и абсолютный.
Инкрементальный энкодер по конструкции проще абсолютного и используется в подавляющем большинстве случаев. Данное устройство можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении диска датчик включается или выключается в зависимости от того, находится ли он над прорезью или нет. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения устройства (см. ниже) и частоты его вращения.

Для того, чтобы определять начальное положение (точку отсчета), используется нуль-метка (выход Z, Zero), которая формируется один раз на полный оборот. Для определения направления вращения у энкодеров обычно имеются два выхода (А и В), на которых импульсы сдвинуты по фазе на четверть периода. По разнице фаз можно однозначно определить, в какую сторону вращается вал.
Основным минусом инкрементального энкодера является необходимость непрерывной обработки и анализа сигналов — для этого требуется контроллер и соответствующая программа. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки.
Абсолютный энкодер имеет более сложное устройство, но позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. На выходе абсолютного энкодера действует параллельный код Грея, разрядность которого определяет разрешение, а значит и точность показаний датчика.
Основные параметры
Главный параметр любого энкодера – разрешение, то есть количество импульсов (для абсолютного преобразователя – разрядность, или количество бит) на один оборот. Довольно часто используются преобразователи с разрешением 1024 импульса на оборот.
Прочие параметры:
- напряжение питания – от 5 до 24 В
- тип вала – сплошной, полый, без вала (сквозное отверстие)
- диаметр вала или отверстия
- тип выхода – как правило, транзисторный выход с открытым коллектором
- также учитываются размер корпуса, тип крепления и степень защиты
Также учитываются размер корпуса, тип крепления и степень защиты.
Монтаж
Энкодер крепится на валу, параметры вращения которого измеряются. Для монтажа используется специальная переходная муфта, позволяющая компенсировать возможную несоосность с валом энкодера, при этом его корпус должен быть жестко зафиксирован.
Другой вариант крепежа подходит для преобразователей с полым валом. В этом случае вал, параметры вращения которого подлежат измерению, непосредственно входит внутрь преобразователя и фиксируется в полой втулке либо в сквозном отверстии. В данном случае корпус энкодера не фиксируется, за исключением какой-либо пластины или ограничителя, не позволяющей ему вращаться.
Подключение
В простейшем случае, если позволяет ситуация, выход энкодера можно подключить ко входу счетчика и запрограммировать его на измерение скорости.
Но, как правило, энкодер используется совместно с контроллером. К контроллеру подключаются все необходимые выходы, и его программа рассчитывает скорость, ускорение, положение объекта с необходимыми коэффициентами и размерностями.
Например, энкодер установлен на валу электродвигателя, который перемещает одну деталь по направлению к другой. Путем вычислений на экране оператора отображается зазор между деталями, а при достижении некоторого минимального зазора движение деталей прекращается, чтобы избежать их повреждения.
Также преобразователи угловых перемещений нередко используются в качестве элемента обратной связи на валу двигателя, подключенного через частотный преобразователь. В этом случае энкодер устанавливается на валу двигателя или редуктора, и подключается к частотнику через специальную плату сопряжения. Таким образом, появляется возможность точного позиционирования поддержания нужной скорости и момента двигателя.
Другие полезные материалы:
10 типичных проблем с частотниками
Использование тормозных резисторов с ПЧ
tehprivod.su
Что такое энкодер и для чего он нужен
Для того чтобы понять, что такое энкодер, достаточно обратиться к английскому языку. Слово «encoder» переводится как преобразователь. Этот прибор широко используется в промышленной области.
Что такое энкодер
В русском языке слово эндокер употребляют для обозначения датчика, который используется, чтобы преобразовать в электрический сигнал подконтрольную величину (датчик угла поворота). С его помощью определяют положение вала в электродвигателе.
Датчики используют в производстве станков, роботов и других приборов. За счёт их использования определяется угол поворота отдельных частей механизма.
Устройство прибора
Существует два вида датчиков: инкрементальные и абсолютные.
Так, за счёт действия инкрементальных датчиков происходит фиксация импульсов, в зависимости от количества которых определяется и угол вращения. В качестве рабочей величины применяется значение количества импульсов на единицу поворота.

Инкрементальные энкодеры используются в создании станков и автоматизированных систем
За счёт действия абсолютных энкодеров положение объекта может быть определено мгновенно после включения. Это, в свою очередь, одно из условий корректной работы сложных автоматизированных систем. Мгновенный результат достигается благодаря сложным процессам электронной обработки сигналов, а также наличию оптической схемы.

Абсолютные эндокеры применимы гораздо шире
Чем можно заменить
На сегодняшний день отсутствуют аналоги, позволяющие столь же эффективно определять угол поворота механизмов, вследствие чего в отдельных областях науки и техники эндокер остаётся незаменимым.
Энкодер — незамениемое устройство в промышленности, с помощью которого можно измерить угол поворота объекта во время вращения.
elektro.guru
Принцип работы энкодеров
Датчики углового и линейного перемещения, датчики наклона
Инкрементальные энкодеры
Инкрементальный энкодер (Incremental Encoder) регистрирует относительное перемещение (приращение). Разрешение (Resolution) углового энкодера определяется количеством импульсов на один оборот (на рисунке изображён оптический дик с разрешением 8 имп/об).
Частота импульсов на выходе энкодера пропорциональна скорости вращения.
Система управления должна подсчитывать импульсы, чтобы вычислить угол поворота энкодера относительно точки отсчёта.
В системах, работающих с абсолютными координатами (станок с ЧПУ), перед началом работы (после включения питания) необходимо выставить ноль – вывести рабочий орган машины в опорную (реперную) точку и в ней обнулить счётчик импульсов.
Синусно-косинусные инкрементальные датчики положения sin/cos 1-Vss и 1-Vpp
Синусоидальные выходные сигналы А и В сдвинуты друг относительно друга на 90 градусов, что позволяет определять направление вращения. Сигнал нулевой метки R используется для синхронизации с точкой отсчёта. Для повышения помехозащищённости датчик выдаёт ещё три инверсных сигнала: A, B, R. Оцифровываются эти сигналы в системе измерения.
Датчики с интерфейсом 1-Vpp используются в сервосистемах, т.к. как позволяют получать очень высокое разрешение. Так, например, если датчик выдаёт 2048 периодов синусоиды (импульсов) на оборот, а система управления в каждой такой синусоиде различает 2048 дискретных уровней, то общее разрешение датчика составит 2048 х 2048 = 4194304 импульсов на оборот.
Инкрементальные датчики с интерфейсом TTL или HTL
Эти датчики сами оцифровывают синусоидальные сигналы – у них на выходе 6 прямоугольных сигналов — три прямых: A, B, R и три инверсных: A, B, R. Для сигнализации неисправности датчика используется инверсный сигнал помехи (если нет неисправности, то сигнал помехи равен 1).
Абсолютные энкодеры
Разрешение абсолютного энкодера (Absolute Encoder) определяется количеством уникальных кодов на один оборот. Однооборотные (Single-turn) абсолютные энкодеры определяют положение в пределах одного оборота, многооборотные (Multi-turn) – в пределах определённого числа оборотов.
Абсолютные датчики положения не требуют для начала работы выхода в опорную точку – при включении питания датчик сразу определяет координату, сканируя кодовые дорожки.
Резольверы
Резольвер (Resolver) – это аналоговый электромагнитный абсолютный однооборотный датчик, работающий по принципу вращающегося электрического трансформатора.
Рассмотрим работу бесщёточного резольвера.
На статоре расположены три обмотки: первичная обмотка возбуждения вращающегося трансформатора
(на неё подаётся переменное напряжение) и две двухфазные обмотки, механически повёрнутые друг относительно друга
на 90 градусов: синусная и косинусная.
На роторе расположена вторичная обмотка вращающегося трансформатора, которая возбуждается от первичной обмотки
на статоре за счёт электромагнитной индукции. Обмотка ротора в свою очередь индуцирует в синусной обмотке статора
напряжение пропорциональное синусу угла поворота ротора, а в косинусной обмотке — напряжение пропорциональное
косинусу угла поворота ротора.
Резольверы отличаются высокой надёжностью (они не бьются и не запотевают, как оптические) и точностью (аналоговые, а не дискретные).
Код Грея
Код Грея (Gray Code) – это двоичный код, в котором два соседних значения отличаются только одним разрядом.
| Десятичное число | Двоичное число | Код Грея |
|---|---|---|
| 0 | 000 | 000 |
| 1 | 001 | 001 |
| 2 | 010 | 011 |
| 3 | 011 | 010 |
| 4 | 100 | 110 |
| 5 | 101 | 111 |
| 6 | 110 | 101 |
| 7 | 111 | 100 |
Формула побитного преобразования двоичного кода в код Грея
Gi = Bi⊕Bi+1,
биты нумеруются справа налево, ⊕ – исключающее ИЛИ (если биты равны, то результат равен 0; если биты не равны, то результат равен 1).
Код Грея используется для кодирования положений в абсолютных датчиках, так как обладает большей помехозащищённостью, чем обычное двоичное кодирование (Natural Binary).
На рисунке изображён оптический диск с 3-х разрядным (8 положений) кодом Грея.
Тахогенераторы
Тахогенераторы предназначены для определения скорости и направления вращения. Напряжение на выходе тахогенератора пропорционально скорости вращения вала.
www.maxplant.ru
что это такое, принцип работы, виды, для чего используется
Энкодер можно отнести к достаточно новым техническим устройствам, которые были бы невозможны без появления робототехнической области науки. Данная разновидность устройств необходима в целях изменения и контроля углов поворотов валов на электродвигателях. Они также используются с целью изменения движения в тех или иных элементах роботов.
Разновидности
Различаются следующие виды энкодеров:
- абсолютного типа;
- инкрементального типа.

Абсолютная модель выдает уникальные цифровые коды относительно отдельно взятого расположения вала, потому становится возможным определять углы поворота даже после того, как было отключено электропитание.
Энкодеры инкрементального вида выдают импульсный цифровой код для каждого отдельно взятого положения вала электромотора. Такие устройства позволяют определять, с какой скоростью вращается вал во время отключения электропитания в том случае, когда нет необходимости сохранять информацию об абсолютном угловом положении.
Иначе говоря, в то время, когда вал не движется, импульс не поступает. Следовательно, когда он снова приходит в движение, датчики будут вести отсчеты его угловых параметров с исходной позиции.
Инкрементальный энкодер

Импульсные (они же пошаговые) энкодеры относят к той разновидности энкодирующих устройств, что предназначены с целью указания направлений углового перемещения всевозможных внешних механизмов. Пошаговые энкодеры формируют импульсы, число которых соответствует числу поворота вала на определенные углы. Они связаны со счетными приборами – это требуется для того, чтобы можно было считать импульсы и преобразовывать их в измерения перемещения вала.
Конструктивные особенности
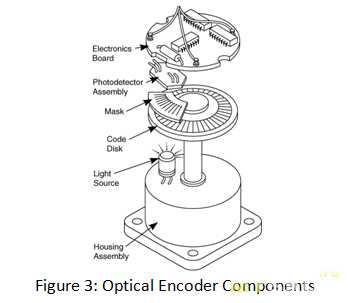
Конструктивной особенностью данной разновидности можно считать наличие следующих элементов:
- источник света;
- специальный диск с нанесенными на нем отметками;
- фототранзисторная сборка;
- схемы для обрабатывания сигналов.
Метки, нанесенные на диск, распределяются определенным образом – их число будет определяться числом импульсов, осуществленных в рамках одного оборота. К примеру, если диск разделяется на 1000 меток, то в продолжение 250 импульсов вал будет повернут под прямым углом.
Применяемые технологии – магнитная и оптическая
Сегодня энкодеры работают, как правило, на основании двух технологий – оптической и магнитной.
Так, в приспособлениях оптического типа в качестве первичных датчиков сигналов выступают оптические диски, описанные выше. Число зачерненных и прозрачных отметок, расположенных на диске, будет определять и степень разрешения.
Но в последнее время популярность начинают приобретать энкодеры магнитного типа. В них сигналы положения вала двигателя формируются специальным датчиком. При этом открываются новые технологические возможности, к примеру, программируемое число импульсов за один оборот.
Квадратура выхода
В качестве так называемой квадратуры выхода в данном виде энкодирующих устройств применяется пара выходных каналов. Они позволяют определять, в каком именно направлении происходит вращение вала.
При этом энкодеры, оборудованные всего одним выходом (на схеме обозначается литерой А), носят название тахометров.
Максимальная частота ответа
В качестве максимальной частоты ответа выступают частоты, при которых работающий энкодер дает электрические ответы. Максимальные частоты определяют число импульсов на выходе, на которые он отзывается в течение одной секунды.
Таким образом, пошаговые энкодеры должны удовлетворять следующему отношению:
(rpm / 60)x(разрешение) меньше или равно максимальной частоте ответа.
Разрешение
Под разрешением подразумевают число выходных импульсов при каждом вращении вала.
Соединительный вал
Чтобы вал датчика был соединен механическим способом, нужно применять специальные гибкие соединители – эластичные муфты. Они предназначены для того, чтобы компенсировать возможное биение вала в любых направлениях.
Благодаря этому, снижается степень преждевременного выхода из строя валового механизма датчика. Даже минимальные люфты могут вывести энкодер из строя.
Виды пошаговых энкодеров и их особенности
Кроме предложенной выше классификации, инкрементальные энкодирующие устройства можно поделить согласно типу информации для считывания.
Одиночные нужны для простого подсчета числа импульсов.
Преимущества:
- максимальная простота в конструкции и использовании;
Недостатки:
- во время запуска непонятно, в каком именно положении находится;
- велика вероятность ошибок во время подсчета импульсов из-за ложного срабатывания;
- нельзя определить направленность движения.
Квадратурные, они же двойные, энкодеры позволяют считывать не только число поступаемых импульсов, но и направление движения.
Преимущества:
- простота конструкции;
- практически отсутствуют ошибки во время счета импульсов;
- можно определять направленность движения.
Недостатки:
- во время запуска непонятно, в каком именно положении находится энкодер.
Энкодирующие устройства, построенные на двоичном коде, позволяют определять точное положение устройства в тот или иной момент.
Преимущества:
- инициализация происходит без ошибок;
- нет необходимости в считывании импульсов;
- можно определять направленность движения.
Недостатки:
- из-за наличия нескольких датчиков аппарат несколько сложнее;
- возникновение проблем с граничным положением в случае использования более одного бита;
- разрешающая способность несколько ограничена.
Энкодирующие устройства, основанные на так называемом коде Грэя, дают возможность определять положение в данный момент.
Преимущества:
- безошибочная инициализация и подсчет импульсов;
- можно определять, в каком направлении происходит вращение;
- можно использовать более одного бита без риска возникновения ошибок на граничном положении.
Недостатки:
- относительно сложны в использовании;
- присутствует определенное ограничение по разрешению.
Некоторые особенности подключения
При подключении и отладке энкодеров необходимо строго придерживаться рекомендаций, данных производителем.
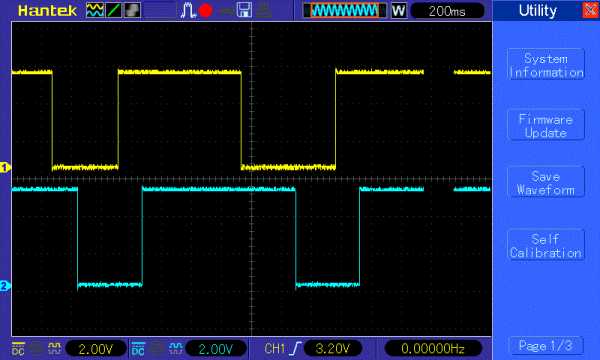
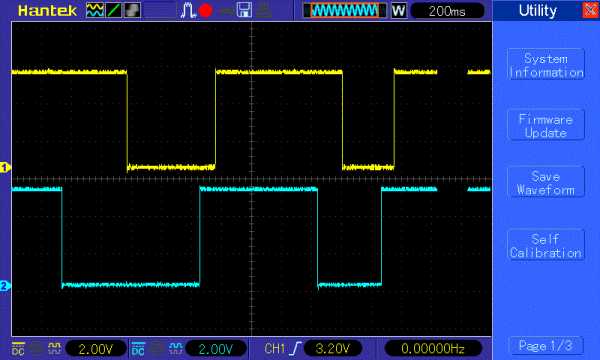
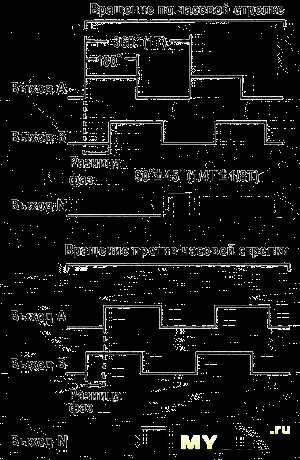
Для начала нужно собрать исходную схему, согласно инструкции от производителя, и подключиться к выводам А и В с помощью осциллографа. Далее необходимо подкрутить подключаемый энкодер сначала по часовой стрелке, а затем – в противоположном направлении. При изменении направления вращения будет изменяться и последовательность замыкания контактных пластин.
Поскольку в энкодерах работают контакты механического типа, то всегда есть риск возникновения так называемого дребезга. Это приводит к тому, что контакт может замыкаться и размыкаться самопроизвольно – из-за естественной упругости материала.
Чтобы избежать дребезга, можно пойти двумя путями. Например, добавить еще несколько конденсаторных или резисторных элементов. Дребезги в этом случае можно довольно легко погасить. При этом осциллограф покажет крутые фронты и отсутствие дребезга.
А вот второй метод является программным. Это потребует от исполнителя знаний программирования. Зато можно будет отслеживать состояние энкодирующего устройства при помощи внешнего прерывания. В этом случае необходимо организовать задержки в течение 2-3 десятков миллисекунд после каждого срабатывания прерывания. В это время энкодер перестанет фиксировать изменения состояний вывода, следовательно, перестанет быть чувствительным к дребезгам.
Используется несколько методов обработки данных, поступающих с прибора. Например, одна из его ножек подключается к выходу для внешнего прерывания и настраивается на прерывание по спадающим фронтам. При этом проверяется положение второй ножки. В том случае, если на ней фиксируется нулевое состояние, движение вала осуществляется в одном направлении. При этом светодиоды загораются или гаснут в зависимости от направления вращения.
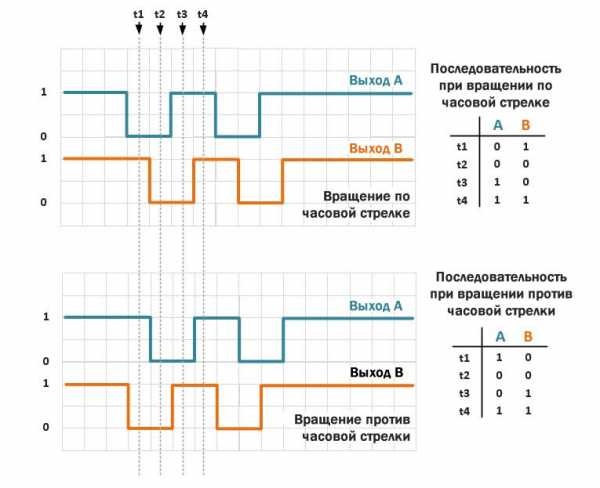
Согласно второму методу, нужно сравнить настоящее положение с предыдущим. Например, предыдущее состояние энкодера равнялось трем. Если последующее положение равняется одному, то вращение осуществляется в одном направлении. Если же оно равно двум, соответственно, в другом. Таким образом, можно будет осуществлять фиксацию перехода из одного положения устройства в другое, и устанавливать направление движения вращения.
Крепление устройства с вращающимися объектами осуществляется через нормальные или полые валы. При этом полый вал может быть выполнен как в сквозном, так и в несквозном варианте. Здесь все зависит от конкретных конструктивных особенностей устройства и преследуемых целей.
Валы энкодера и вращающихся объектов соединяются также с помощью гибких или жестких соединительных муфт. Как альтернативный вариант крепления, нередко используют монтаж прямо на вал самого объекта. Это возможно, если аппарат оснащен полым валом. Чтобы не допустить возможного возникновения несоосности и биений, можно зафиксировать его через штифты. Если же речь идет о неполом вале, то биение может быть скомпенсировано через гибкую деформацию втулки.
Чем привлекательны данные виды энкодеров
Энкодирующие устройства неспроста получили столь обширное распространение при конструировании большого спектра устройств. Они довольно дешевы и просты в монтаже.
Чтобы выбрать верный вариант для успешного внедрения в те или иные управленческие схемы, потребуется определиться:
- Насколько точно требуется проводить измерения. Об этом будет говорить число обрабатываемых импульсов за каждый оборот энкодирующего вала.
- Толщина вала, а также его модельная разновидность. Это влечет за собой необходимость в правильном подборе дополнительного оборудования, такого, как муфты, фланцы и т.д.
- Определиться с необходимой длиной кабеля, его поперечным сечением, а также с типом разъемов на выходе.
- Потребуется принять во внимание величину рабочего напряжения и прочие электрические характеристики.
- Осуществление связи энкодирующего оборудования с остальными элементами системы. Нужно будет уметь его программировать, обеспечивать параметры цикличности осуществления передачи результата замеров с частотностью опроса на входе используемых контроллеров, либо предусмотреть работу в стандартном интерфейсе.
Где применяются
Устройства предлагаются в разных моделях и вариантах исполнения. Следует внимательно подходить к выбору энкодеров. К примеру, если он работает на благо пищепрома, то следует использовать только те разновидности, которые соответствуют нормам гигиены. Как правило, они выполнены из нержавеющих материалов.
В области печатного и текстильного производства датчики обычно дополняют аппаратами для обрабатывания данных.
Инкрементные энкодеры устанавливаются на транспортерах, предназначенных для перемещения древесных заготовок.
Если требуется использовать энкодер при металлообработке, то прибор следует оснастить специализированной защитой от вибрационных воздействий, а также от повышенных температур и попадания внутрь механизма частичек влаги и пыли. На электрические моторы устанавливаются особые виды энкодеров, способных замерять скорости оборотов шпинделя, положение оси и ее продвижение.
Если речь идет о системе автоматизации на производствах, то используются мини-энкодеры диаметром не более 2,5 см и имеющие различные диапазоны напряжений на выходах.
Лифтовые устройства работают на приспособлениях диаметром 4,4 см. Часто их монтируют прямо на лебедках для того, чтобы снизить воздействие на них механического характера.
В медицинском оборудовании датчики-энкодеры применяются в ЭМРТ. Они предназначены для исключения воздействия магнитного поля. Корпус в этом случае изготавливают из непроводящего материала.
В телекоммуникационной сфере энкодеры используются для определения расположения и направленности антенны. Иногда нужно применять датчики для работы в жестких условиях.
Находят свое применение энкодирующие аппараты и в области альтернативной энергетики. К примеру, они устанавливаются на программируемых датчиках, используемых в солнечной ферме. Датчики изготавливаются из специализированных материалов, которые надежно защищены от попадания влаги и ультрафиолета.
Крайне распространены сегодня электромеханические энкодеры, преобразующие вращательные движения в аналоговые или цифровые форматы распространения информации. Они довольно схожи с потенциометрами, однако могут постоянно осуществлять вращение как в направлении часовой стрелки, так и в обратную сторону.
Поворотные энкодеры различаются по нескольким типам. Как уже отмечалось, это абсолютные и инкрементальные – они же относительные. Первому типу выдают значения, которые пропорциональны настоящему углу расположения вала. Второй тип выдает как шаг передвижения валов, так и их направленность. Благодаря этому, именно энкодирующее оборудование поворотного типа получает все большее распространение в различных сферах бытовой электротехники. Главным образом, это конструирование всевозможных управляющих ручек. Часто такие устройства могут заменить потенциометр или кнопки для осуществления навигации.
Если необходимо выполнить быструю навигацию и настройку, либо оперативное введение данных и выбора пунктов меню, то энкодеры также придут на помощь.
Определенные модели имеют специальные кнопки, создающие дополнительные входы для процессоров, которые могут применяться как другие пользовательские команды в организации управленческого интерфейса.
www.techtrends.ru
Оптический энкодер или шутка производителя
Рано или поздно в жизни каждого самоделкина возникает потребность в покупке чего-то такого этакого, что обычно само в голову не придет. Вот и я жил себе спокойно и об энкодерах даже не задумывался.Хотя должен признаться опыт работы с энкодерами имел. Как-то в одной и поделок использовал энкодер из принтера.
В данной истории все приключилось внезапно. Ползая по своим хоббийным форумам натолкнулся на конкурс. Сайт (называть не буду, т.к. разговор не о нем) проводил видимо раскрутку посещаемости и плюс один из форумчан проводил раскрутку своих российского производства изделий. И разыгрывался комплект из 3 наборов для самостоятельной сборки сервоконтроллеров. Я зарегистрировался на этом форуме, подал заявку (вместе с 3 или 4-мя всего лишь участниками) и… выиграл.
Так я стал обладателем 3-х наборов для сборки сервоконтроллеров. Далее мне потребовались энкодеры. Позволю себе объяснить для читателей не так глубоко погруженных в электронные компоненты, что такое сервоконтроллер, энкодер и с чем все это едят.
Есть 2 основных способа управлять точным перемещением в изделиях с ЧПУ (числовое программное управление). Попробую объяснить максимально доступным языком, без сложных схем и терминов.
Первый способ это шаговые двигатели. Шаговый двигатель имеет сложное устройство — несколько катушек, притягивающих сердечник в заданных положениях.
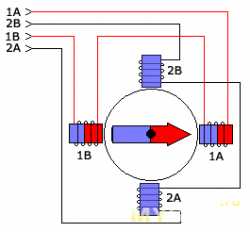

Количество положений, в которых может быть зафиксирован сердечник называется шагами, промежуточные положения (регулируются различными промежуточными напряжениями и соответственно магнитными полями) называют микрошагами. Управляет шаговым двигателем драйвер — это плата управления, как правило с микропереключателями шагов и регулировкой тока, протекающего через двигатель. На вход драйвера подаются сигналы: Enable (разрешить работу шагового двигателя), DIR (направление вращения), STEP (количество шагов, на которое двигателю необходимо повернуть вал). И драйвер переводит команды в обороты вала двигателя. Очень простая и надежная конструкция. Из минусов — скорость вращения двигателя ограничена из-за его конструктива, и если двигатель пропустит по той или иной причине шаги, то управляющая программа об этом не узнает. Отсюда и область применения — низко и среднескоростные двигатели в заданной области нагрузок. Например 3Д принтер или хоббийные станки.
Второй способ управлять перемещениями — сервомотор. Мотор сам по себе может быть любым, постоянного или переменного тока, без разницы. Единственное условие, его вал должен иметь энкодер. Энкодер — это устройство определения позиции вала в данный момент времени. Об энкодерах мы поговорим подробнее чуть позже. Сервоконтроллер имеет другой принцип работы, в отличии от драйвера шагового двигателя. Сервоконтроллер получает на входе те же самые сигналы Enable, STEP, DIR и подает на двигатель напряжение. Двигатель начинает вращаться в нужном направлении, энкодер возвращает данные о положении вала двигателя. Как нужное положение достигается, вал двигателя в нем фиксируется. Конечно это сильно упрощено, т.к. есть ускорение и торможение двигателя, управление током и напряжением, пропорционально-интегрально-дифференцирующий (ПИД) регулятор в контуре обратной связи,… но мы же договорились в этот раз не сильно лезть в теорию.

Какие же плюсы серводвигателей: любая скорость вращения, отсутствие пропуска шагов, бесшумность (шаговый двигатель ощутимо громок в работе из-за своего конструктива). Но цена сервоконтроллеров выше и существенно драйверов шаговых двигателей. Поэтому основная ниша сервоконтроллеров — профессиональное применение.
Для своего проекта я выбрал двигатели Динамо Сливен. Эти двигатели широко использовались в советское время в ЭВМ и их было какое-то нереально большое количество. Кажется, что практически любой хоббийщик или имеет такой двигатель или сталкивался с ним. На барахолках их до сих пор перепродают. Это двигатели постоянного тока с фантастическим неубиваемым ресурсом и устойчивостью к любым издевательствам.

В качестве сервоконтроллера я использовал выигранную плату. Она представляет собой развитие open source сервоконтроллера, известного под устойчивым брендом «сервоконтроллер Чена» — по имени китайца, году так в 2004-м, если не ошибаюсь, предложившим данную схему.

Теперь уже практически переходим сути обзора — к энкодерам. Выбор энкодера был осуществлен по характеристикам и цене. Какие бывают типы энкодеров. В основном это оптические и магнитные. Магнитные — когда на краях диска закреплены магниты, а возле них находится датчик Холла.
Решение дорогое, промышленное, обладает повышенной надежностью. Цена не хоббийная ни разу.
Оптические энкодеры. Самое распространенное решение. Есть в каждой мышке. Раньше отвечали за вращение шарика и колесика. Теперь шариков уже нет, а вот колесики остались. Принцип работы прост — прерывание светового пучка проходящим непрозрачным телом.

Оптические энкодеры есть 2-х типов: инкрементальные и абсолютные. Инкрементальные делятся на 2 подтипа. Простейшие инкрементальные — такие как изображены на рисунке выше. Они определяют пересечение светового потока и на их основе можно построить, например, тахометр. Недостаток данного энкодера состоит в том, что при помощи него невозможно определить направление вращения диска. Инкрементальные 2-х канальные решают задачу определения направления вращения диска.
Для этого используется не один фотодиод, а несколько, обычно 4. Они формируют 2 независимых канала передачи данных, и сравнивая сигналы с этих каналов можно однозначно сделать вывод о направлении вращения диска.
Какие же недостатки есть у данного инкрементального энкодера? Недостаток один, но для ряда применений он критичный. При инициализации энкодера мы не знаем в каком положении находится диск. Т.е. мы можем узнать только направление и скорость вращения диска.
Для получения полной информации, а именно — начальное положение диска, направление и скорость вращения используются абсолютные энкодеры.
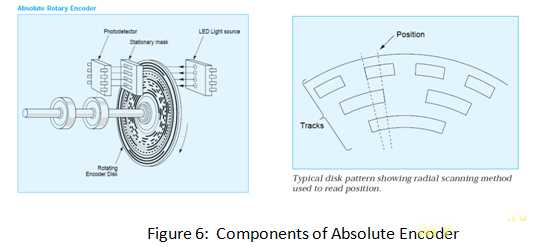
Абсолютные энкодеры используют диск со сложной системой кодировки положения. Наиболее распространен код Грея — двоичная кодировка с защитой от ошибок.
Я остановил свой выбор на инкрементальном энкодере с контролем направления вращения, т.е. с двумя квадратурными каналами вывода информации. Разрешения в 100 линий на оборот диска мне было за глаза. Поэтому на Алиэкспрессе я нашел энкодеры за разумную цену и с нужными мне характеристиками.
Вот фотка 3-х пришедших мне энкодеров. Дошли они недели за 3.

У энкодеров 4 вывода, Красный — питание 5В, Черный — земля, Цветные — каналы А и В.
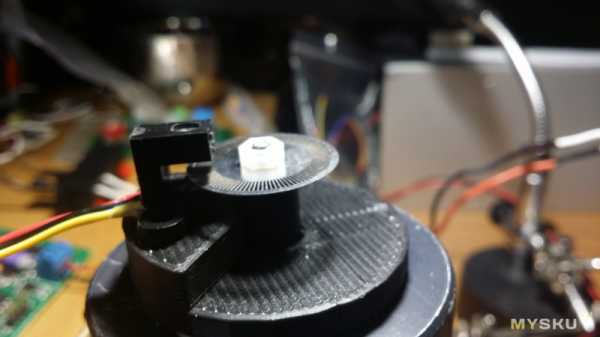
Я быстренько выточил втулочку на вал двигателя под крепление диска, ввинтил туда стержень с резьбой.

На 3Д принтере распечатал площадку под крепление датчика энкодера

Собрал все вместе
Подключил сервоконтроллер, и… тут бы был счастливый конец обзору, но нет. Ничего не заработало. Даже близко ничего не заработало.
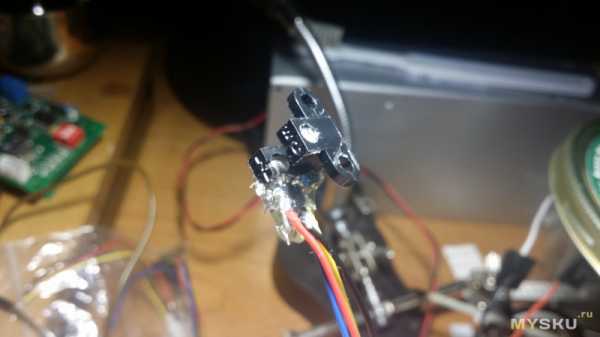
Подключил осциллограф и понял, что никаких квадратурных сигналов на выходе нет, только шумы, наводки и непонятные выплески. Грешил я на все на свете. И на требовательность к позиционированию, и на засветку, и на наводки электромагнитные. И часами аккуратно возюкал датчик в разных положениях, выключал свет и пытался проделать все тоже самое в темное. «Крокодил не ловится, не растет кокос.» Разумеется я перепробовал все 3 энкодера. Везде тоже самое. И тут меня дернуло поразглядывать датчик в микроскоп.

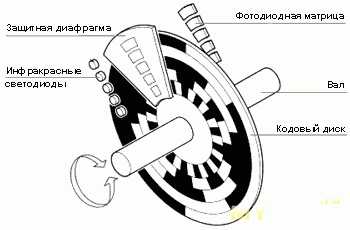
То что я увидел повергло меня в изумление. Все 4 сенсора стояли в ряд по радиусу диска, т.е. засвечивались через прорезь диска одновременно. Разумеется ничего не работало. Датчики должны стоять перпендикулярно радиусу диска, и засвечиваться последовательно разными фронтами прорези диска. Я не мог поверить, что это так просто и так глупо. Китайцы поставили датчик с поворотом на 90 градусов. Я спросил на форуме у такого же как я покупателя таких же энкодеров как у него стоит датчик. И у него все было также неправильно и не работало.
Почесав в затылке я решил попробовать это дело исправить. Энкодер разобрался легко, при помощи фена расплавил термоклей и достал внутренности.

Поднес датчик к диску так чтобы сенсоры был поперек рисок. Конечно датчик корректно не встал, но на осциллографе начал появляться какой-то осмысленный сигнал.
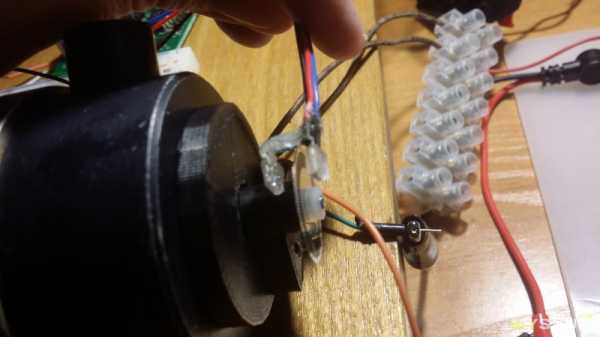
Дальше разрезал корпус энкодера сбоку, наростил проводочками расстояние между светодиодом и матрицей сенсоров и засунул все в корпус по-новому.
На фото видно, что сенсоры стали перпендикулярно радиусу диска.
Собрал, подключил к сервоконтроллеру и… Бинго, все заработало! Мотор встал в режим удержания позиции. Т.е. при попытке проворота вала двигателя, мотор упирается и если его все же провернуть, то возвращается в исходное положение.

Ну а дальше двигатель займет свое место на фрезерном станке, но это уже совсем другая история…:-)
Как резюме. Энкодер из коробки не работает. К покупке не рекомендую. Но в своей ценовой категории, если он был бы исправным, это хорошее бюджетное решение. Либо если переделка изделия в работающее не пугает, то можно брать и переделывать.
У продавца куча положительных отзывов на такой энкодер. Либо это все липа, либо, что вероятнее, брак пошел массово совсем недавно.
Я написал продавцу, он пока шлет мне тонну технических описаний и предлагает попробовать еще, и намекает, что это я не разобрался. Буду на него давить. Пусть хоть часть денег вернет. Я столько времени угрохал из-за их заводского разгильдяйства.
Всем добра и удовольствия от хобби!
mysku.ru
Энкодер — это… Что такое Энкодер?
Оптические энкодеры
Оптические энкодеры имеют жёстко и закреплённый соосно валу стеклянный диск с прецизионной оптической шкалой. При вращении объекта оптопара считывает информацию, а электроника преобразовывает её в последовательность дискретных электрических импульсов. Абсолютные оптические энкодеры — это датчики угла поворота, где каждому положению вала соответствует уникальный цифровой выходной код, который наряду с числом оборотов является основным рабочим параметром датчика. Абсолютные оптические энкодеры, так же как и инкрементальные энкодеры, считывают и фиксируют параметры вращения оптического диска.
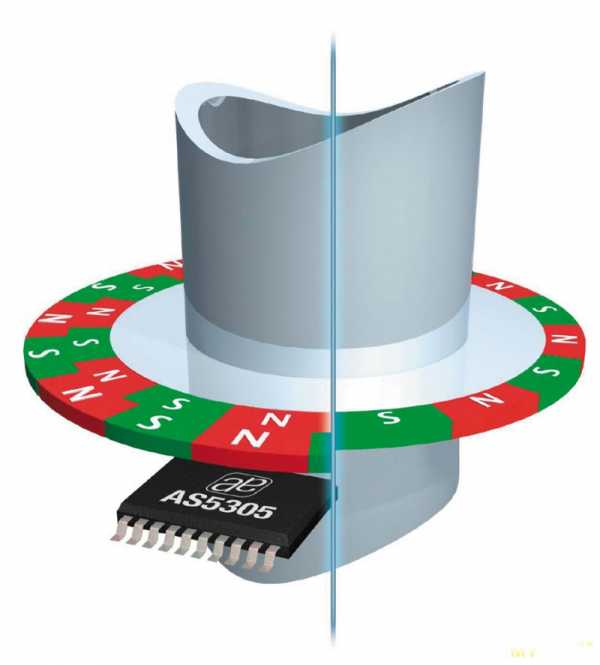
Магнитные энкодеры
Магнитные энкодеры с высокой точностью регистрируют прохождение магнитных полюсов вращающегося магнитного элемента непосредственно вблизи чувствительного элемента, преобразуя эти данные в соответствующий цифровой код.
Механические и оптические энкодеры с последовательным выходом
Содержат диск из диэлектрика или стекла с нанесёнными выпуклыми, проводящими или непрозрачными участками. Считывание абсолютного угла поворота диска производится линейкой переключателей или контактов в случае механической схемы и линейкой оптронов в случае оптической. Выходные сигналы представляют собой код Грея, позволяющий избавиться от неоднозначности интерпретации сигнала.
Крепление
Представленные датчики соединяются с вращающимся объектом посредством нормального или полого вала, последний может быть как сквозным, так и несквозным (тупиковым). Вал вращающегося объекта и вал энкодера соединяют механически при помощи гибкой или жёсткой соединительной муфты. В качестве альтернативы энкодер монтируют непосредственно на вал объекта, если энкодер имеет полый вал. В первом случае вероятная несоосность и допустимые биения компенсируются деформацией гибкой втулки. Во втором возможна фиксация энкодера посредством штифта.
Ссылки
Примечания
См. также
dic.academic.ru
