

3D сканер Циклоп. Своими руками
Добавлено в закладки: 3
Ciclop 3D Scanner by bqLabs
http://www.bq.com/gb/products/ciclop.html
http://diwo.bq.com/en/ciclop-released-2/
Код прошивки https://github.com/bq/horus-fw
HEX прошивки http://diwo.bq.com/en/horus-fw-released/
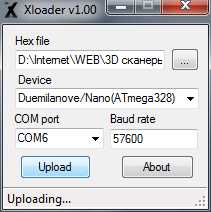
Заливка Хекса прошивки http://russemotto.com/xloader/
Опыт постройки Циклопа “3D-сканер Ciclop – дьявол в мелочах!”
Картинки и видео смотрим на Thingiverse

Что нужно для сборки
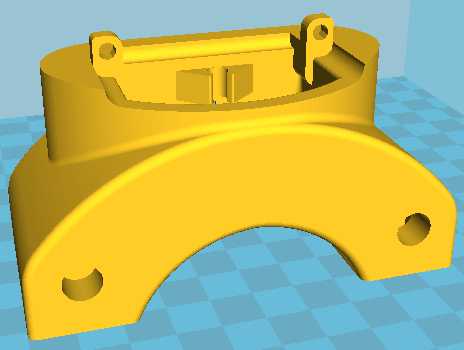
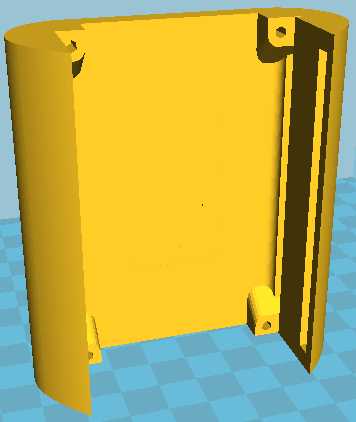
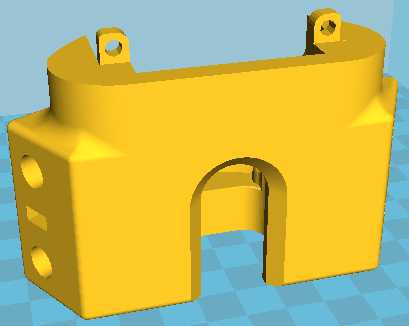
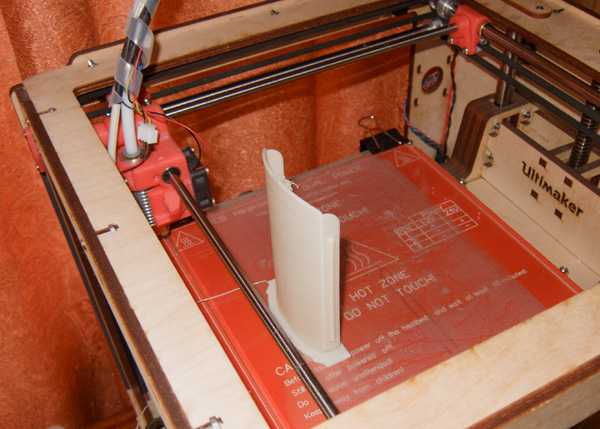
Пластиковые детали
Посадочное отверстие под лазеры должно быть диаметром 12 мм.

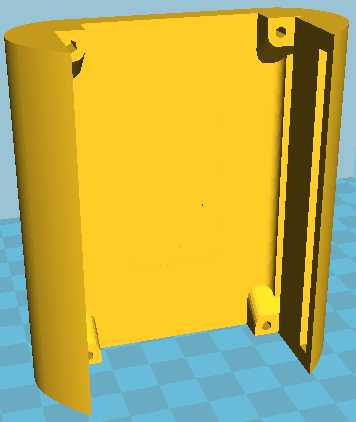
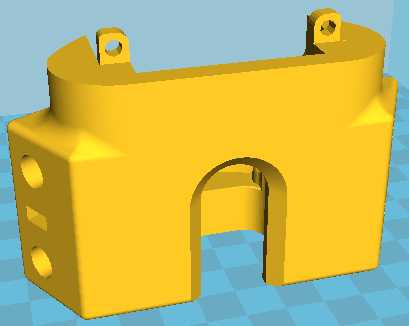
Теперь нужно по умному разделить деталь camera-holder.stl
Почистил ее от поддержек. Порезал на три части под скрутку винтами M3x10. Скачать архив с stl моделями.
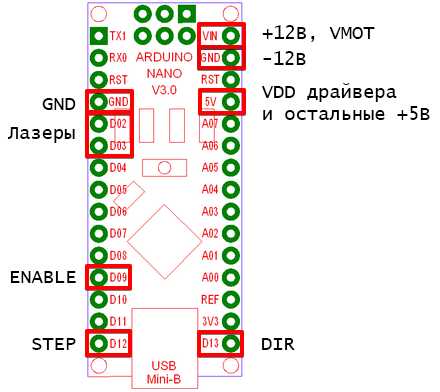
Общая схема подключения драйвера шагового двигателя
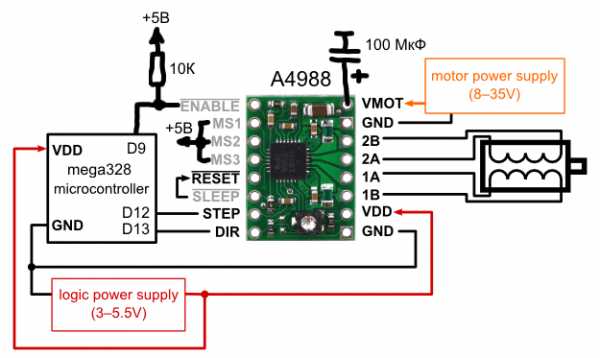
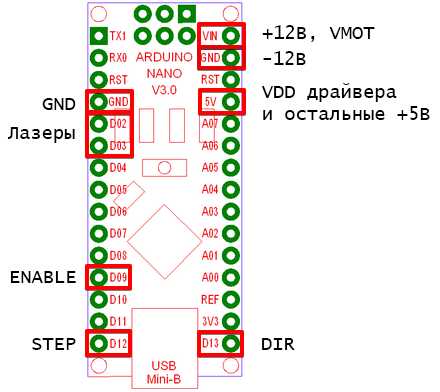
Подключение к Arduino Nano
Лазеры подключаем D2+GND, D3+GND
Общая схема сборки 3D сканера Циклоп

Подробные картинки смотрим на Thingiverse
Сборка столика
3 – М3х10 винт 5 штук
4 – М3 гайка 1 штука
6 – М8х30 болт 3 штуки. Вкручивается в диск (10). Можно взять винт М8 “в потай” и вкрутить сверху вниз, затянув внизу гайкой.
Установка и фиксация лазеров
2 – М3х10 винт фиксации корпуса лазера, 2 шт
3 – М3 гайка 2 штуки
4 – Лазер 2 штуки
Сошпиливание
1 – М8х400 резьбовая шпилька 2 штуки
2 – М8 гайка 28 штук
3 – М8 шайба 18 штук. Прокладывается между гайкой и пластиковой деталью
4 – Кабельканал. Можно заменить изолентой
5 – М8х292 резьбовая шпилька 1 штука
7 – Кабельканалы 3 штуки. Можно заменить изолентой или термоусадкой
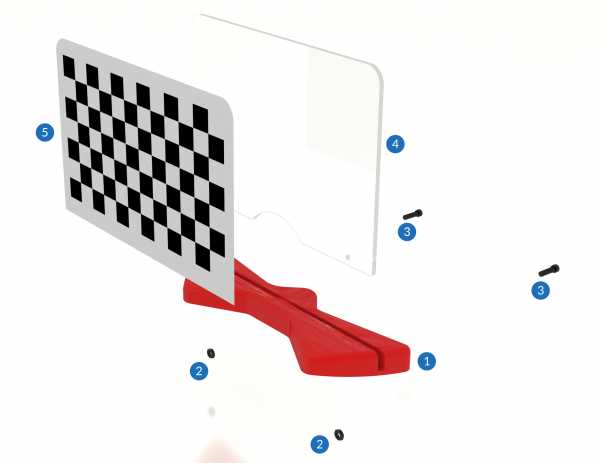
Сборка холдера шахматного паттерна
2 – М3 гайка 2 штуки
3 – М3×10 винт 2 штуки
4 – картонка-фанерка
5 – шахматная бумажка-наклейка. pdf, svg
Видео сборки
Пока сам не начал собирать мне кажется, что этого достаточно для сборки
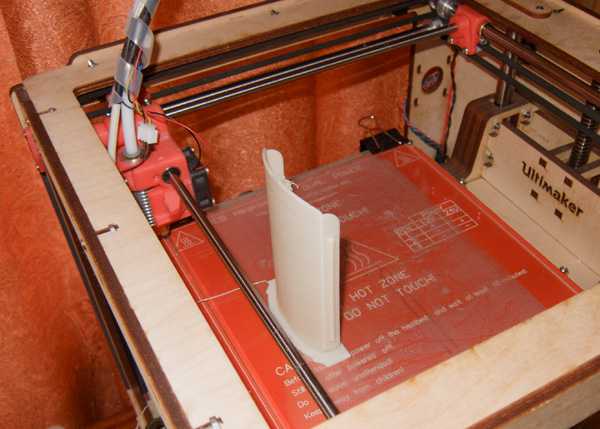
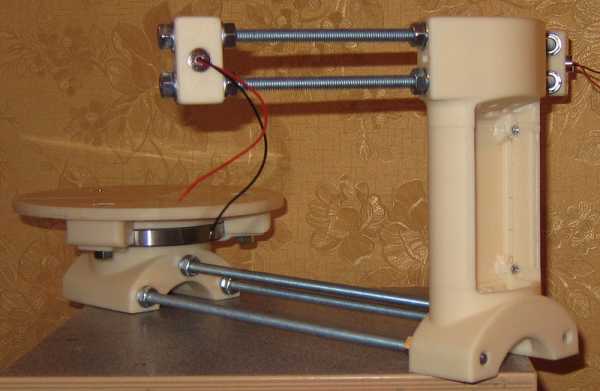
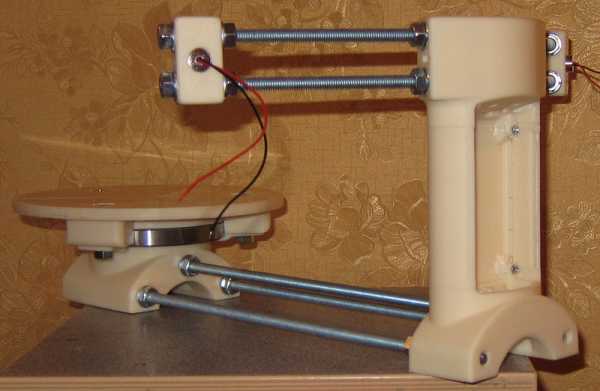
Сборка

Брутальный подшипник

Примерка

Наклеиваю кожанку на столик

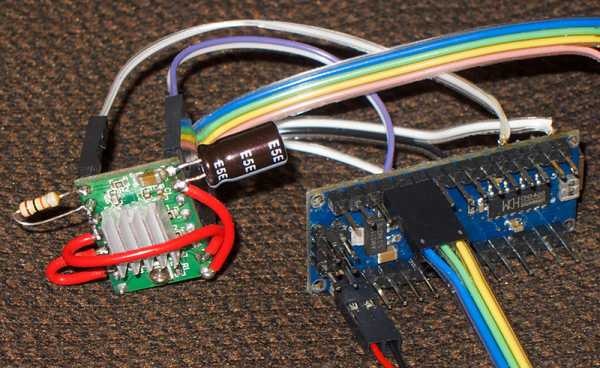
Паяю проводки на драйвере


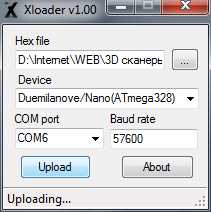
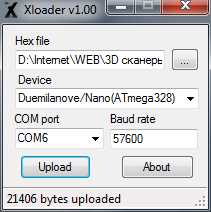
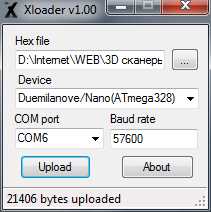
Заливаю HEX прошивки и “о чудо” она заливается.
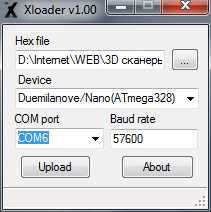
COM порт в Хорусе пришлось вписать вручную, так как автоматически определяет неверно (определяет Мегу от 3D принтера) и выбор не предоставляет.
Вот такой получился сканер. Теперь можно переходить к настройке.

Обсуждение статьи на форуме.
Метки: Ciclop, Циклоп  
2015-10-22  
  
Раздел: Новичку, Постройка 3D сканера, Своими руками  
3deshnik.ru
сборка Циклопа своими руками и работа с программой для лазерного сканирования
Приветствую всех. Сегодня — маленький обзор настольного сканера Ciclop.В очередной раз магазин предложил взять на обзор что-нибудь. Поскольку меня давно интересовал вопрос применения данной штуки для нужд декоративной 3d-печати — я выбрал сканер.
Итак, сам сканер был разработан испанской компанией BQ, которая в настоящее время прекратила его поддержку (якобы из-за китайских подделок, но сомнительно. Сейчас данным сканером торгует и американская CowTech. Исходники для 3d печати частей сканера — лежат в свободном доступе на Thingiverse (там же ссылки на софт и электронику).
Ссылки на полные комплекты документации:
www.cowtechengineering.com/downloads
www.bq.com/ru/support/ciclop/support-sheet
В комплекте имеем вот такую «рассыпуху»:
Сборка незамысловата, однако есть несколько моментов:
1. Спешить затягивать все гайки не стоит — придётся еще подстраивать геометрические размеры — сходимость лазеров в центре площадки, расстояния до поворотной платформы.
2. В моей стойке камера чуточку «болталась», на доли миллиметра — но этого хватило для перекоса картинки. Устранил подкладыванием вспененного материала.
4. Поворотная платформа была прозрачной и не имела покрытия (как в оригинале) — я покрасил ее plastidip-ом.
5. Проверяйте шаблоны калибровочной «шахматки». Не знаю как печатали ту, которая из моего комплекта — но пропорции квадратиков были нарушены. Взял из интернета и перепечатал сам.
6. Фокус камеры не настроен на расстояние до платформы. Снял крышку и подкрутил фокус по месту.





Как видим, «мозгами» сканера является обычная Arduino Uno в связки шилдом ZUM Scan и драйвером шагового двигателя A4988. Управляется хозяйство «родным» софтом Horus от BQ.
После сборки, сканер прошел калибровочные процедуры в родном софте Horus.
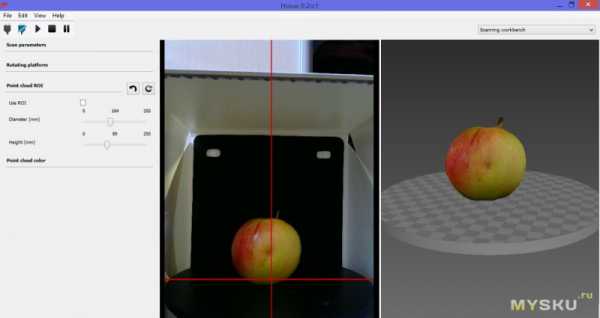
Поскольку к этому моменту я уже знал, что качество сканирования очень сильно зависит от качества освещения (стабильности, рассеянности, цветовой температуры) я заранее озаботился наличием маленького лайтбокса, чтобы хотя бы обеспечить мало-мальски сопоставимые условия для проб.

Подобрав «кандидатов» для проб, я приготовился.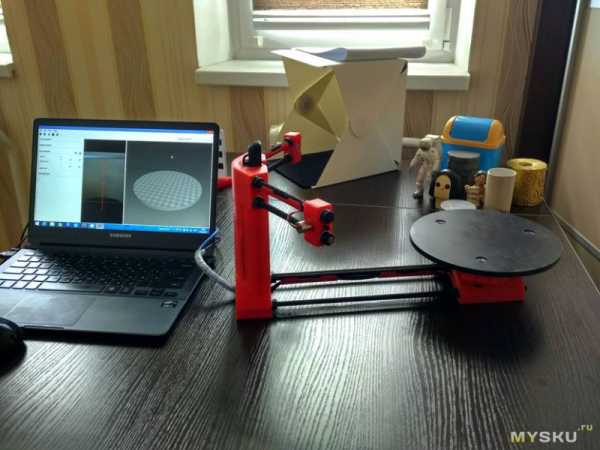
Требования к объекту заявлены такие:
1. Объект должен быть больше 5х5 см, но меньше чем 20х20см
2. Объект должен быть непрозрачным и неподвижным
3. Объект должен весить не больше 3 кг
Затруднительно сканировать:
1. Блестящие, светящиеся объекты
2. Слишком темные объекты
3. Объекты с размытой поверхностью (например, мягкие игрушки)
Результатом сканирования является облако точек в формате PLY (которые потом необходимо преобразовать в поверхность). Вот здесь руководство для пост-обработки облака и подготовки STL-файла.
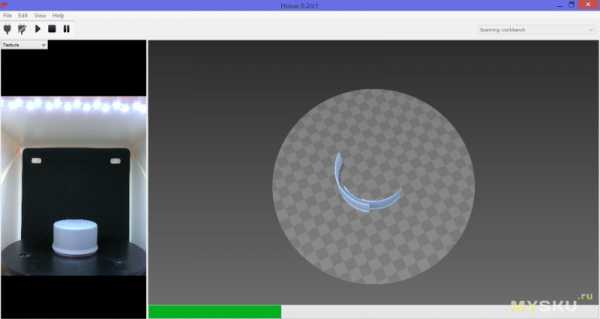
Почитав руководство по оптимизации сканирования, попробовать я решил с простого цилиндрического предмета.
После нескольких попыток я убедился, что имею распространенную проблему — несовпадения облаков точек от правого и левого лазера, да и с пропорциями вопрос.
Ничего путного по данному поводу кроме попытки откалибровать настройки вебкамеры (они не калибруются при работе мастера калибровки) найти не удалось (чувак по имени Иисус из саппорта BQ — давно не отвечает на вопросы). Для этого необходимо наделать несколько снимков с различными положениями калибровочной таблицы. Наделал. Положение улучшилось, но не до конца.
Пришлось ручками править калибровочный файл (calibration.json в папке Horus-a) и методом проб ошибок, сканируя цилиндрический предмет — добиваться совпадения облаков.
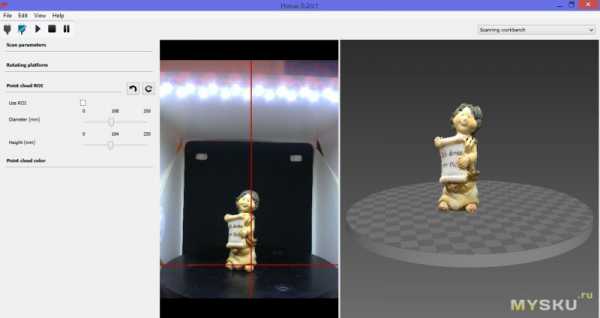
И вот вроде все ок: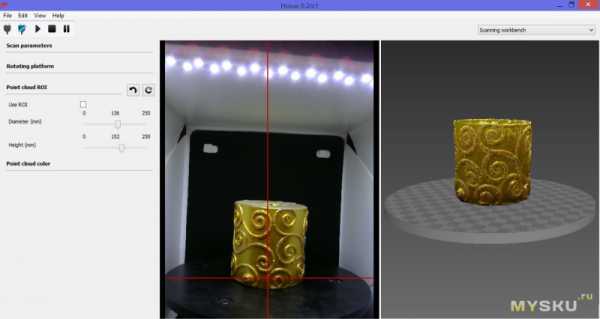
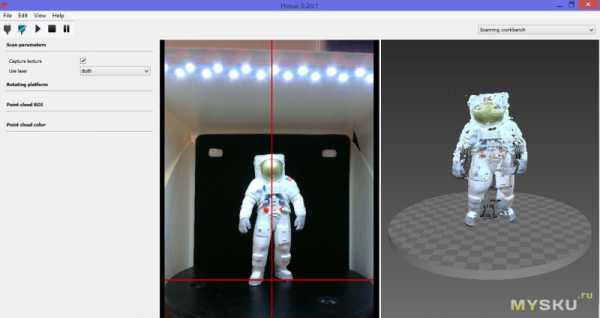
Но нет — на сложных предметах фрагменты облаков все равно порой не совпадают, к тому же образуется много «слепых» зон:
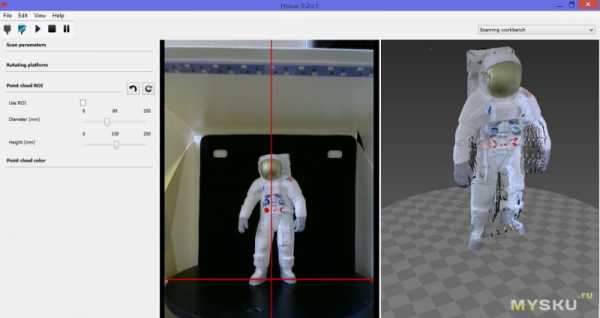
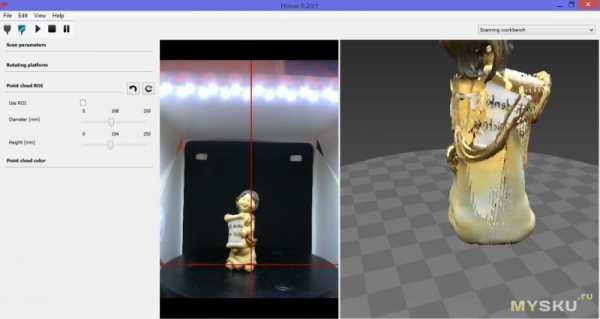
Кроме того, очевидно, что сканирование ярко красных предметов будет невозможно, во всяком случае с штатными лазерами.
Можно, конечно продолжать экспериментировать со сканированием отдельными лазерами и попытками в стороннем софте совместить все это хозяйство, а потом попытаться приводить в жизнеспособный для STL вид.
Все это напоминает один анекдот с корабликами в бутылках.
-Как ты делаешь кораблики в бутылках?
-В бутылку помещаю песок, силикатный клей, палочки и трясу.
Получается всякое говно, а иногда — кораблики.
В общем, я понял, что адептом подобного творчества не являюсь, и имею подозрение, что с нуля смоделировать предметы, которые по силу сканеру — проще. А сложные — со сложными не справляется сканер в штатном режиме, маловато ему двух лазеров -остаются слепые зоны. Для устранения данной проблемы — надо сканировать в других положениях и потом опять мучиться с совмещением облаков. Нет уж, спасибо.
В итоге — штука сгодится только для изучения основ лазерного сканирования, для чего то более — абсолютно бесполезная. Нет, конечно, получить нечто очертаниями похожее на исходную модель — можно, но на этом (и это с учетом всех бубнов с обработкой облаков) — всё. Не зря видать испанцы закинули это дело.
Магазин подстраховался — в описании честно изложено, что результат зависит от положения планет и настроения тети Сони с третьего этажа. Опенсорс и все такое, давайте плясать вместе. Нет уж, спасибо.
Вывод — не брать, а если охота экстрима -собрать самому из того же, из чего товарищ из анекдота делает кораблики.
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
mysku.ru
сканировать 3D DIY Циклоп + код скидки
После игры с 3D-принтер, место в 3D сканер! И, в частности, затем Циклоп DIY 3D сканера.
Почему Циклоп?
Ну хорошо, по разным причинам:
- Это среди самых дешевых 3D сканеров
- Это DIY, сделать это самостоятельно, то есть самостоятельной сборки
- Это открытым исходным кодом
Что нужно знать перед покупкой Циклоп
Это не непосредственно .stl в конце сканирования файла, но файл .ply, который состоит из облака точек. И этот .ply файл должен быть преобразован в .stl, это требует лечения работы. Кроме того по словам некоторых обратной связи, которые можно найти в Интернете, визуализации детали довольно бедны.
Но зачем покупать ее / его выбрать его на другой?
Потому что согласно моим исследованиям, другие конкуренты видимо также отображаются как бедных в то время как они стоят дороже, 3-5 x! Затем взять дешевле! От вскользь, будьте осторожны, я заметил, что один из хорошо известных конкурентов и 3 раза дороже, что Циклоп соглашается работать с только одной модели процессора! Что делает, что если ваш компьютер не имеет эта модель процессора в частности (и, конечно, есть нет легко этот info!), ваш сканер больше используется для ничего… Так что лично я не доверяю не визуализации, что обратные связи, которые я видел, они слишком мало. Вы должны знать, что это рендеринга зависит от многих параметров, яркости и отсканированные часть! В основном, это как принтер 3D, согласно настройкам, вы можете иметь красивый кусок, средняя часть или кучу растопленным провода! В дополнение к визуализации, является тот факт, что он является открытым исходным кодом. Это гораздо проще изменить что-либо на устройстве, что другой модели или ничего не фильтровать частей, метод и т.д… С демократизации 3D принтеры было бы интересно также узнать демократизации 3D сканеры, однако это пока не так. Процесс демократизации 3D принтеры удалось благодаря работе Джозефа Prusa, который также сделал его работу на 3D принтере открытым исходным кодом, а также благодаря своей общины. Лично у меня есть несколько идей в виду улучшить Циклоп, как только я получаю Минимальное управляющее, я до сих пор ничего не знают о то, что будет делать мои изменения, или если они собираются сделать что-то, но я хочу попробовать! И кто знает, если когда-нибудь мои улучшений, которые там будут преданы вдохновить других и так далее,… может быть, видеть нас в день выполнения 3D сканеры по низким ценам? Кроме того, ВОЗ в настоящее время имеют 3D-принтер, он легче меня на создание новых произведений для улучшения Циклоп. Но прежде всего, я буду первый тест в базовой версии 3D сканера Циклоп!
Особенности
- Тип сканера: индивидуальные/офис
- Технология: Лазерной триангуляции
- Размер (мм): 450 x 330 x 230 мм
- Максимальный размер моделирования (мм): 250 x 205 мм
- Моделирование (мм) минимальный размер: 50 мм
- Вес (кг): 2,25 кг
- Точность (мм): 0.50
- Формат экспорта: курсируют
- Программное обеспечение: Гора
- Подключение: USB-кабель
- Совместимость системы: Windows, Linux, Mac
- Питание: 12 V 1,5 A
Тест
Первое, что нужно знать, что оригинальная модель БК Циклоп, но потому, что он является открытым исходным кодом, любой может скопировать его. Протестированных модель является клоном. Это не является, не потому что это китайский клон, он будет работать, менее хорошо знают это. Вторая вещь, это, что у меня есть руководство с 3D сканер, поэтому он взял меня в Интернете, и я должен признаться, что хорошая документация, которая показывает в Интернете немного разбросаны (с большим количеством неработающую ссылку), и мы очень легко потерять в БК, хорус, Циклоп Tre… Резюме: БК это бренд, который разработал модель сканера под названием Циклоп. Гора — это имя для 2 вещей: это прошивка для электронных карт, но и имя программы, используемой для использования и настройки 3D сканер! Затем, в отличие от 3D-принтер, это 3D сканер очень легко собрать, я бы сказал, что в течение часа, это уже готов! Здесь HTTPS://www.YouTube.com/watch?v=VYQuiM_4nls — ссылка на руководство: возможность иметь детали (на английском языке) на Instructables: http://www.instructables.com/id/Ciclop-3D-Scanner-BQ-Horus/ скачать программы, что позволяет для использования сканера: http://storage.googleapis.com/bq-horus/releases/Horus_0.1.2.4.exe использование Руководство программы Horus: Гора V.0.1.2 – Руководство по использованию Horus_Guide_d’utilisation_0 – 1475833279.1, учитывая, что новости, дисперсионные короче везде, это вопрос, который позволяет понять и улучшить системы сканирования: https://storage.googleapis.com/bqcom15.statics.bq.com/prod/resources/manual/Guide_pour_une_nume%CC%81risation_optimale-1475833389.pdf район Скачать для более или менее всю информацию, вам нужно: https://www.bq.com/en/support/ciclop/support-sheet есть раздел на сайте БК, который посвящен Циклоп DIWO часть, за исключением того, что все ссылки являются мертвым на этой стороне здесь… На практике что это? Ну я рад впервые развернули 3D-принтер, а затем только 3D сканер! Редактирование 3D-принтер является более сложным, чем монтировать 3D сканер, но программное обеспечение 3D принтера гораздо легче контролировать хорошее сканирования! Некоторые горячие испытан
ия: после тестирования, это намного лучше!Заключение
Опыт очень интересно и стоит посетить! Здание идет без забот и калибровки, но проверка требует много настройки, чтобы получить хорошие параметры, которые будет необходимо изменить на каждом сканирования по яркости, номер и т.д… Я буду пытаться получить лучшие возможности рендеринга с Циклоп без изменения его, и тогда я буду пытаться сделать улучшения там, где это возможно. Ссылка: https://www.gearbest.com/3d-printers-3d-printer-kits/pp_426876.html?lkid=11304296 и наслаждайтесь содействие момент с код купона: OctAllezciclop

Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
pandoon.info
3D сканер Ciclop. Своими руками.
Ciclop 3D Scanner by bqLabshttp://www.bq.com/gb/products/ciclop.html
http://diwo.bq.com/en/ciclop-released-2/
Код прошивки https://github.com/bq/horus-fw
HEX прошивки http://diwo.bq.com/en/horus-fw-released/
Заливка Хекса прошивки http://russemotto.com/xloader/
Опыт постройки Циклопа «3D-сканер Ciclop — дьявол в мелочах!»
Обсуждение моих изысканий на ТриДэшнике http://3deshnik.ru/forum/viewtopic.php?f=8&t=15
Что мне нужно для сборки
- Контроллер Arduino Nano
- Веб камера Logitech C270
- Два лазера 650nm 5mW Red Laser Line Module (12х36 мм)
- Драйвер шагового двигателя A4988
- Шаговый двигатель Nema 17 (1.7А 1,8 град/шаг) не длинее 40 мм
- Конденсатор 100 Мкф 35В
- Резистор 10К
- Блок питания 12В 1,5А
- Шариковый подшипник 16014
- Ø200 x 8 мм круглая база. Может напечатать из трёх частей?
- Ø200 мм нескользящее покрытие
- Шпильки М8
- Гайки М8
- Шайбы М8
- Винты и гайки М3
- Напечатанные пластиковые детали
- Прямоугольный шахматный паттерн (контур pattern-surface.dxf)
Пластиковые детали
Посадочное отверстие под лазеры должно быть диаметром 12 мм.
Теперь нужно по умному разделить деталь camera-holder.stl
Почистил ее от поддержек. Можно скачать чистую деталь. Пока буду резать на три части под скрутку винтами.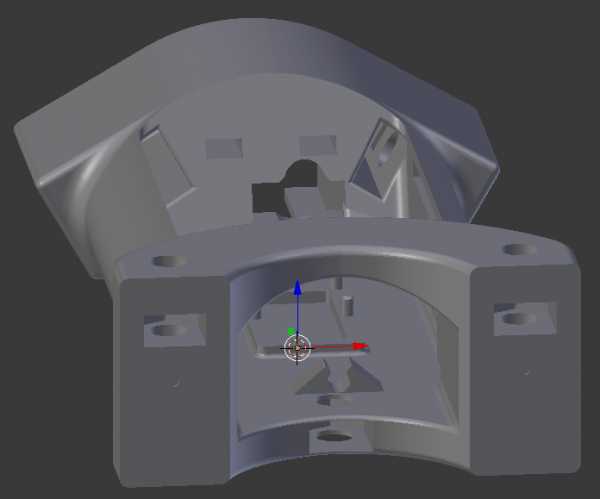
Порезал на три части под скрутку винтами M3x10. Скачать архив с stl моделями.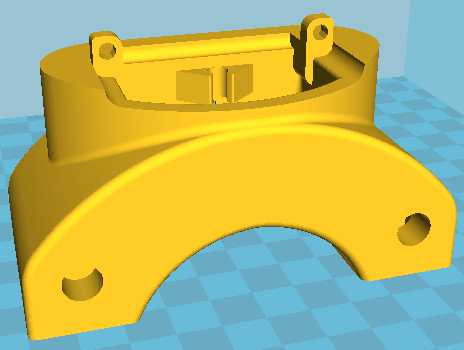
Общая схема подключения драйвера шагового двигателя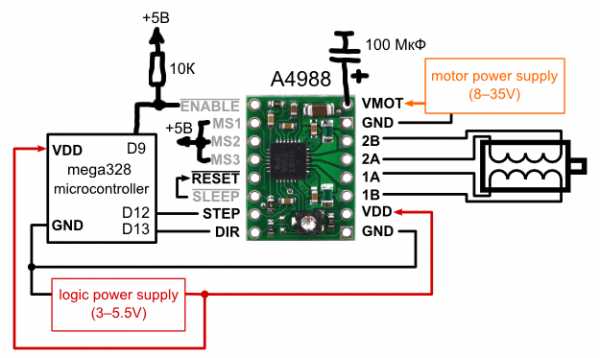
Подключение к Arduino Nano
Лазеры подключаем D2+GND, D3+GND
Общая схема сборки

Сборка столика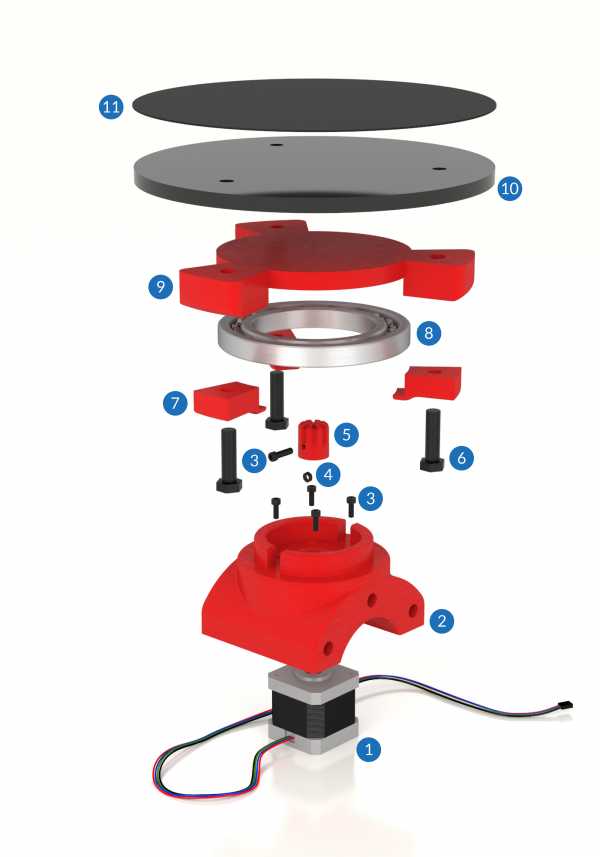
3 — М3х10 винт 5 штук
4 — М3 гайка 1 штука
6 — М8х30 болт 3 штуки. Вкручивается в диск (10). Можно взять винт М8 «в потай» и вкрутить сверху вниз, затянув внизу гайкой.

Установка и фиксация лазеров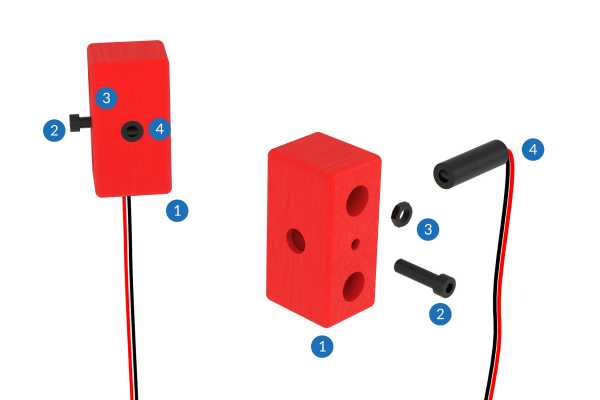
2 — М3х10 винт фиксации корпуса лазера, 2 шт
3 — М3 гайка 2 штуки
4 — Лазер 2 штуки
Сошпиливание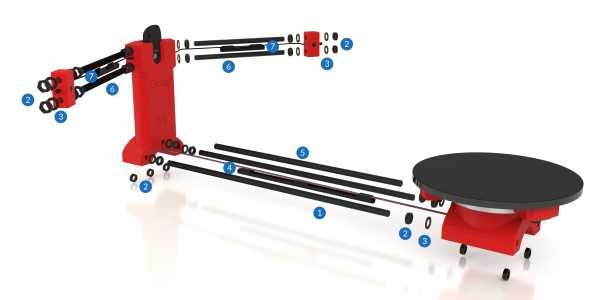
1 — М8х400 резьбовая шпилька 2 штуки
2 — М8 гайка 28 штук
3 — М8 шайба 18 штук. Прокладывается между гайкой и пластиковой деталью
4 — Кабельканал. Можно заменить изолентой
5 — М8х292 резьбовая шпилька 1 штука
6 — М8х170 резьбовая шпилька 4 штуки. Держат лазеры. Думаю разумнее здесь ставить более тонкие шпильки
7 — Кабельканалы 3 штуки. Можно заменить изолентой или термоусадкой

Сборка холдера шахматного паттерна
2 — М3 гайка 2 штуки
3 — М3×10 винт 2 штуки
4 — картонка-фанерка
5 — шахматная бумажка-наклейка. pdf, svg

Видео сборки
Пока сам не начал собирать мне кажется, что этого достаточно для сборки. По ходу дела инфа будет меняться и дополняться.
Сборка

Брутальный подшипник


Наклеиваю кожанку на столик
Паяю проводки на драйвере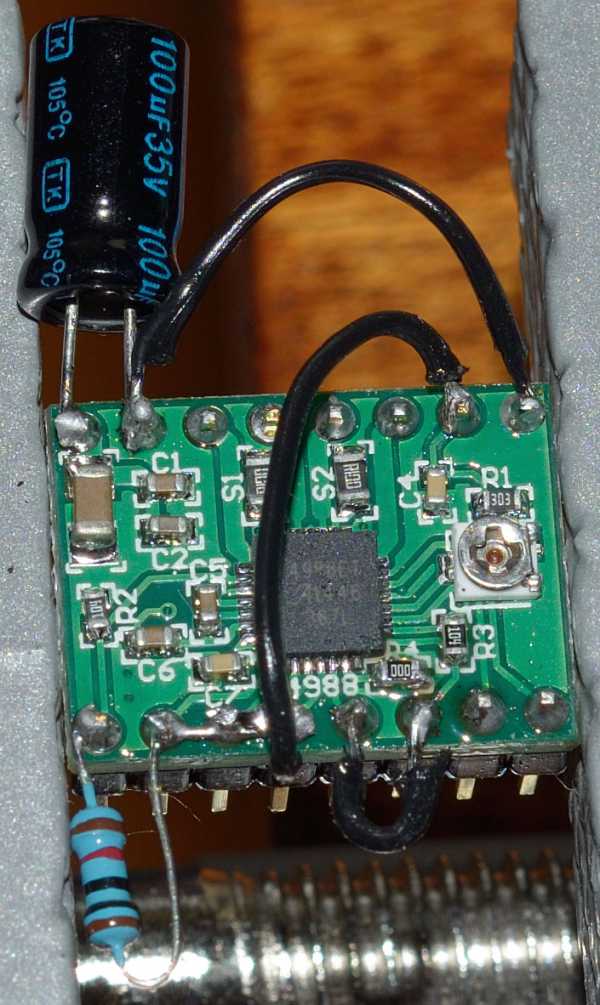
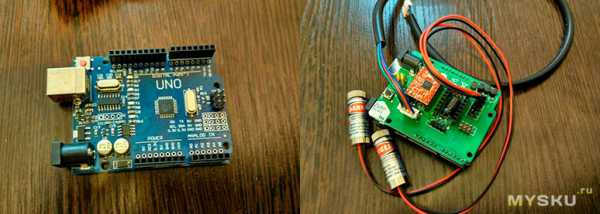
В итоге придётся делать на Arduino Uno, так как с Нанами я просчитался.
Вот уже и натыкал коннекторов в UNO 😉
Приехали. Хорус не видит COM порт UNO.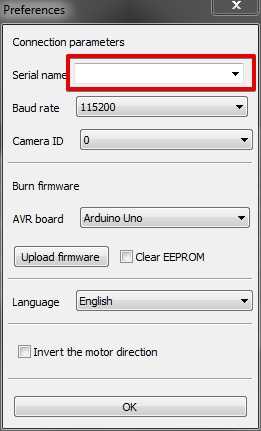
А в диспетчере устройств вместо Arduino UNO написано Ch440. Похоже придётся бутлоадер перепрошивать.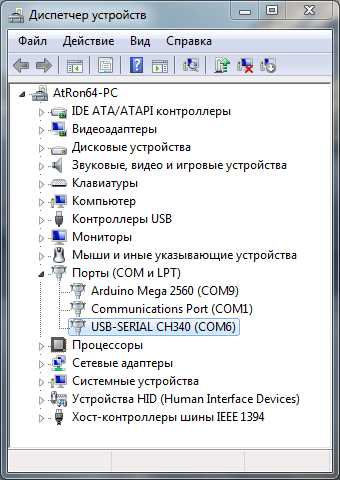
Вот правильная схема для прошивки UNO (Duemilanova) через MEGA 2560. Только у меня кондёр на 100 мкф (наверное пойдёт). Буду проверять.
Шаги прошивки бутлоадера в Arduino UNO (Duemilanova), через Arduino Mega:
[Нажмите, чтобы прочитать]
шаг 1 — К Меге ничего не подключено, кроме USB кабеля. Запускаем Arduino IDE. Выставляем параметры Меги: Плата, Процессор, Порт.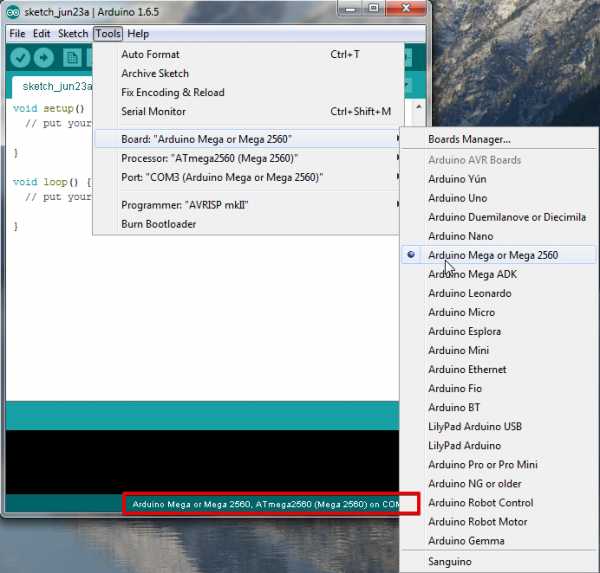
шаг 2 — Переходим в меню Файл -> Образцы и жмём ArduinoISP. В редактор загружается скетч программатора ArduinoISP. Жмём круглую кнопку со стрелкой вправо «Вгрузить» и заливаем скетч в Мегу.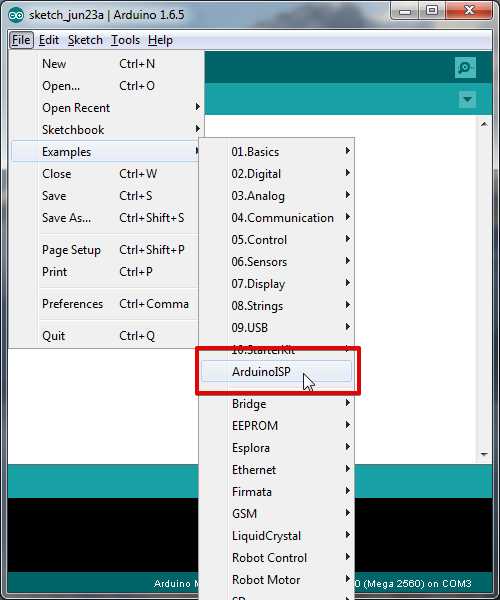
шаг 3 — Отсоединяем Мегу от всего и подсоединяем к UNO (Duemilanova) по схеме (выше). А так же втыкаем конденсатор (у меня на 100 мкФ). Подключаем Мегу по USB к компьютеру.
шаг 4 — Теперь в Arduino IDE выставляем параметры для UNO (Duemilanova): Плата, Процессор, Порт
шаг 5 — Заходим в меню Инструменты -> Программатор и жмём на «Arduino as ISP». Теперь наша Мега стала программатором.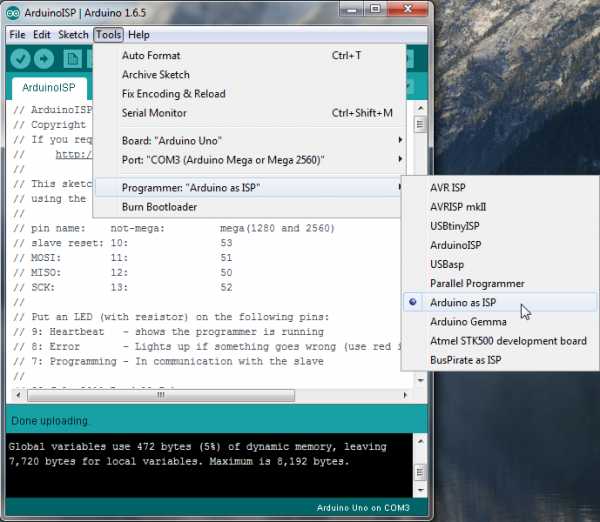
шаг 5 — Прошиваем bootloader на UNO (Duemilanova) через Мегу. В меню Инструменты жмём «Записать загрузчик». На обеих платах должны мигать светодиоды. Готово. Всё отсоединяем.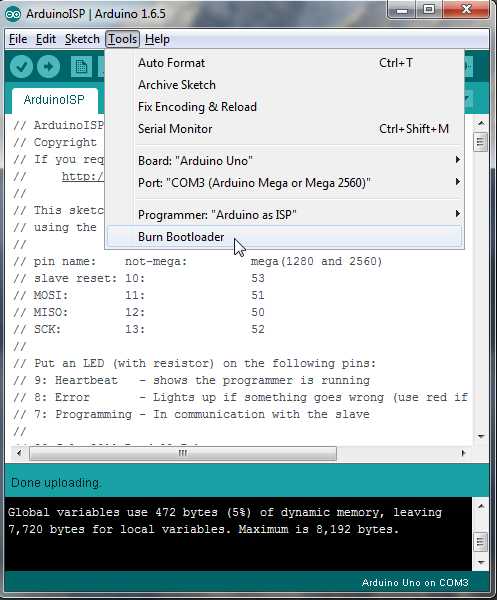
Пробовал перепрошить Bootloader по схеме в UNO. Всё мигало и заливалось, но в итоге ничего не вышло. Видимо фьюзы неправильные.
Освободилась Arduino Nano и я подлключил её к компьютеру. В диспетчере устройств опять вижу Ch440, но ведь она то рабочая. Запускаю Xloader и заливаю HEX прошивки. Всё проходит, как по маслу. Подключаю UNO — Xloader зависает на прошивке, светодиоды не моргают. Вычитал, что под UNO может быть замасктрована Duemilanova. Ну и чем Чёрт не шутит, решил прошить на неё бутлоадер от этой Duemilanova. Замигали светодиоды — жизнь есть. Заливаю HEX прошивки и «о чудо» она заливается. Вот, что значит «правильные фьюзы» 🙂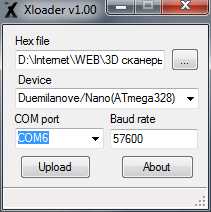
Вот такие настройки я выставил в Хорусе, иначе не работает. COM порт вписал сам, так как автоматически определяет неверно (определяет Мегу от 3D принтера) и выбор не предоставляет.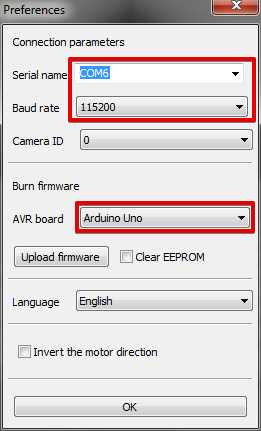
Обсуждение моих изысканий на ТриДэшнике http://3deshnik.ru/forum/viewtopic.php?f=8&t=15
akdzg.livejournal.com
3d сканер Ciclop

Приветствую всех. Сегодня — маленький обзор настольного сканера Ciclop.
В очередной раз магазин предложил взять на обзор что-нибудь. Поскольку меня давно интересовал вопрос применения данной штуки для нужд декоративной 3d-печати — я выбрал сканер.
Итак, сам сканер был разработан испанской компанией BQ, которая в настоящее время прекратила его поддержку (якобы из-за китайских подделок, но сомнительно. Сейчас данным сканером торгует и американская CowTech. Исходники для 3d печати частей сканера — лежат в свободном доступе на Thingiverse (там же ссылки на софт и электронику).
Ссылки на полные комплекты документации:
www.cowtechengineering.com/downloads
www.bq.com/ru/support/ciclop/support-sheet
В комплекте имеем вот такую «рассыпуху»:
Сборка незамысловата, однако есть несколько моментов:
1. Спешить затягивать все гайки не стоит — придётся еще подстраивать геометрические размеры — сходимость лазеров в центре площадки, расстояния до поворотной платформы.
2. В моей стойке камера чуточку «болталась», на доли миллиметра — но этого хватило для перекоса картинки. Устранил подкладыванием вспененного материала.
4. Поворотная платформа была прозрачной и не имела покрытия (как в оригинале) — я покрасил ее plastidip-ом.
5. Проверяйте шаблоны калибровочной «шахматки». Не знаю как печатали ту, которая из моего комплекта — но пропорции квадратиков были нарушены. Взял из интернета и перепечатал сам.
6. Фокус камеры не настроен на расстояние до платформы. Снял крышку и подкрутил фокус по месту.




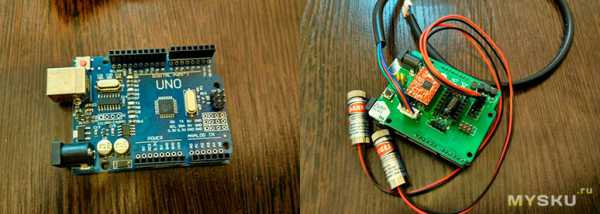

Как видим, «мозгами» сканера является обычная Arduino Uno в связки шилдом ZUM Scan и драйвером шагового двигателя A4988. Управляется хозяйство «родным» софтом Horus от BQ.
После сборки, сканер прошел калибровочные процедуры в родном софте Horus.
Поскольку к этому моменту я уже знал, что качество сканирования оче
mysku.me
3Д СКАНЕР ЦИКЛОП СОБИРАЕМ ПОДКЛЮЧАЕМ СКАНИРУЕМ 3d scaner ciclop Часть 2 – Китай Г.
ГОТОВЫЙ ВАРИАНТ СКАНЕРА fas.st/Tvv7oqДЛЯ СБОРКИ СКАНЕРА ПОНАДОБИТСЯ:
1. Пластиковые детали сканера fas.st/8ygzA…РАЗВЕРНИ ОПИСАНИЕ
2. Шаговый двигатель fas.st/-JFUO
3. Лазеры fas.st/S67d1
4. Камера fas.st/HTbJNY
5. Набор электроники для сканера fas.st/D9qYyJ
6. Подшипник fas.st/nqgGVn (можно напечатать спрашивать тут vk.com/skynepdai )
7. БЛОК ПИТАНИЯ fas.st/vJuRC
8. ПОДОШВА fas.st/I_4Hi5
ПЕРВАЯ ЧАСТЬ ВИДЕО ПО СБОРКЕ СКАНЕРА ТУТ youtube.com/watch?v=giqrxh-lKRg&list…
ПЕЧАТЬ ДЕТАЛЕЙ ПОД ЗАКАЗ vk.com/skynepdai
Драйвер двигателя A4988 fas.st/jnzHi
Драйвер двигателя A3967 fas.st/SDUsFV
АРДУИНО NANO fas.st/5Ldmke
ARDUINOUNO fas.st/GR7A_W
ПРОЕКТ 3D СКАНЕР Ciclop thingiverse.com/thing:740357
ПАТЕРН ДЛЯ КАЛИБРОВКИ thingiverse.com/download:1188665
Прошивка goo.gl/DgnosB
Подпишись на канал и ты не пожалеешь goo.gl/nAdLzK
Группа ВК vk.com/club84543902
Хотите заработать на своем канале YouTube?
Ежемесячный отчет о доходах на моем канале:
goo.gl/TqPk2e
3D ПЕЧАТЬ goo.gl/kBN67V NEW!!!
KIT из Китая goo.gl/LzLI6L
ИНСТРУМЕНТЫ ИЗ КИТАЯ goo.gl/8AlrfQ
КОМП ИЗ КИТАЯ goo.gl/gTcgRY
Отмычки goo.gl/y0L7vb
АВТО ПРИБАМБАСЫ ИЗ КИТАЯ goo.gl/8Vi5nd
Рекомендую goo.gl/phchVb
Посылка от подписчика goo.gl/pKZLM6
Игрушки из Китая goo.gl/rFpOCp
На сегодняшний день могу предложить вашему вниманию несколько направлений в которых мы с вами будем разбираться:
— KIT из Китая, оченьтема видео, в котором мы будем собирать различные электронные устройства и тестировать их.
— «Рекомендую» — Цикл видео в которые будут попадать распаковки, которые мне понравились.
— Отмычки, в рамках этого проекта мы будем открывать замки без ключа, не выходя при этом за рамки закона!
— Посылка от подписчика, тут будем открывать посылки которые вы мне отправляете 😉
— «Как заработать на YouTube?» в рамках этой темы я делюсь опытом о заработке на канале, раз в месяц в данной ветке, видео отчет о доходах.
— Игрушки из Китая, лучшие игрушки для детей и взрослых)
Китай Г. не такой как все! Присоединяйтесь к нам, будет интересно!
newsvideo.su
3D сканер bq Ciclop
3D сканер bq Ciclop
Сканер Ciclop предназначен для производителей, конструкторов и всех тех, кому требуется получить трехмерную модель физического объекта. Вместе с тем, именно конечный пользователь будет выбирать способ применения, наилучшим образом соответствующий его потребностям.
Простота сборки и открытость для усовершенствований
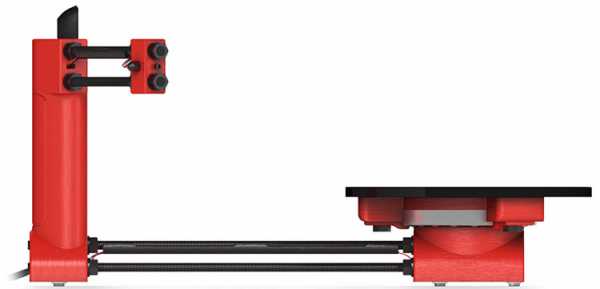
Ciclop является лазерным ротационным триангуляционным 3D сканером. Он использует в своей работе 2 лазерных луча для получения данных о геометрии и структуре объекта сканирования, вращающегося на поворотном столе.
3D-сканер Ciclop был сконструирован с учетом последующего процесса его сборки. Набор включает в себя все необходимые детали и пошаговое руководство по сборке, благодаря чему сканер можно собрать менее чем за час.
Ciclop отслеживает, Horus воспроизводит
Программное обеспечение Horus является кроссплатформенным приложением, разработанным компанией BQ и выпускаемым ею под лицензией CC-BY-SA. Через интерфейс программы можно производить калибровку сканера, регулировать экспозицию камеры или визуализировать облака точек сканирования.
Взаимодействие с ПО Horus осуществляется через три рабочих стола: контроля за компонентами (камерой, лазерами, электродвигателем и фоторезисторами), калибровки и сканирования.
Автокалибровка — это отличительное преимущество 3D сканер bq Ciclop
Ciclop является сканером типа DIY («сделай сам»), и при ручной сборке расстояния между элементами и их положения в конечном продукте могут отличаться, что затрудняет калибровку устройства. Horus устраняет это неудобство путем точной автоматической калибровки внутренних параметров сканера, исходя из конструкции, собранной пользователем. Благодаря этому гарантирован хороший результат каждого сканирования.
Ключевой элемент 3D сканера bq Ciclop — его электронная начинка
Плата ZUM BT-328 на платформе ArduinoTM включает в себя усовершенствования и функционал аналогичных плат, что делает ее лучшим выбором для разработки электронных проектов. ZUM BT-328отвечает за работу программно-аппаратных средств управления электродвигателем и лазерами.
К верхней ее части подсоединена плата питания ZUM SCAN, разработанная на основе Arduino CNC Shield.
3D сканер bq Ciclop дополняет семейство DIY-продуктов от компании BQ. В связке с Prusa i3 Hephestos или другим 3D-принтером он предоставляет вам новые возможности по превращению в осязаемые объекты ваших проектов, отсканированных с помощью Ciclop и Horus.
Видео-инструкция по сборке 3D сканера bq Ciclop
Дополнительные характеристики 3D сканера bq Ciclop:
- Сканов на оборот: 1600 макс.
- Объем сканирования: (Ø) 250 x (H) 205 мм.
- Максимальный вес нагрузки: 3 кг.
- Управление микропрограммным обеспечением с помощью G-кодов.
- Плата управления: ZUM BT-328.
- Плата питания: ZUM SCAN Shield.
- Шаговый двигатель Nema (1,7 A 1,8 град/шаг).
- Радиально-упорные шарикоподшипники 16014.
- Основа из метакрилата Ø 200×8 мм/dd.
- Противоскользящая поверхность Ø 200 мм.
- Шпильки резьбовые.
- Печатные детали из PLA-пластика.
- Прямоугольная рамка из метакрилата.
tevo3dprinter.ru
