
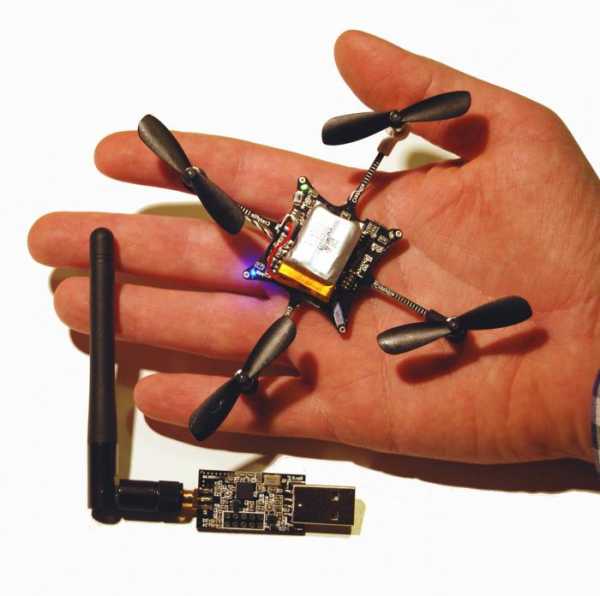
Как собрать квадрокоптер своими руками. Настройка и управление квадрокоптером
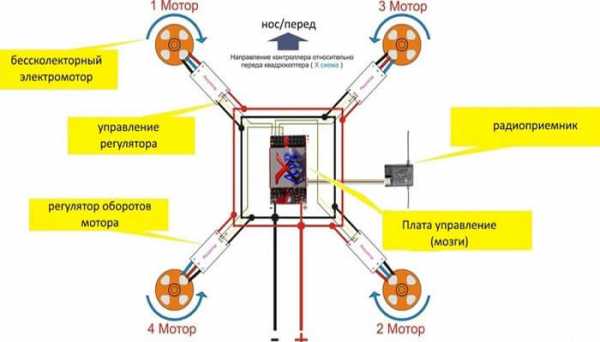
Квадрокоптер представляет собой летающую платформу на радиоуправлении с четырьмя бесколлекторными двигателями, оснащенными пропеллерами. В состав таких аппаратов включается летающая многороторная платформа. В полете квадрокоптер занимает относительно поверхности земли горизонтальное положение, способен зависнуть над выбранным местом, перемещается в стороны, вверх и вниз. Наличие специального дополнительного оборудования позволяет квадрокоптеру осуществлять практически автономные полеты.

Квадрокоптер с камерой
Этот прибор оснащен четырьмя роторами, которые осуществляют вращение диагонально в противоположных направлениях. Роторами управляет процессор, который сообщает данные с трех гироскопов, предназначенных для определения и фиксации положения в пространстве во всех трех плоскостях. Благодаря акселерометру удается занять абсолютно горизонтальное положение. Фиксация квадрокоптера на нужной высоте осуществляется благодаря оснащению бародатчиком. Прибор смещается в пространстве за счет того, что изменяется скорость вращения той или иной двойки моторов. Происходит крен квадрокоптера с его дальнейшим перемещением.
Первые приборы
Это направление начало развиваться в 2006 году. Разработчики из Германии Инго Бускер и Хольген Бусс создали квадрокоптер своими руками. Вокруг него собралось огромное сообщество увлеченных людей – RC-моделистов, программистов, конструкторов. В середине 2007 года квадрокоптеры стали парить и вполне устойчиво перемещаться в воздухе. Такие приборы отличаются от радиоуправляемых вертолетов в положительную сторону благодаря гибкости конструкции и дешевизне. Необходимое для квадрокоптера оборудование можно приобрести, а дальше есть огромный простор для творчества. Помимо этого, в случае падения обычно ремонт такого прибора обходится гораздо дешевле, чем радиоуправляемого вертолета.

Как собрать квадрокоптер своими руками: инструкция
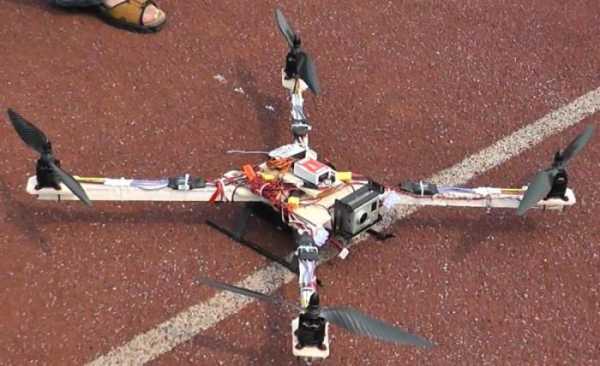
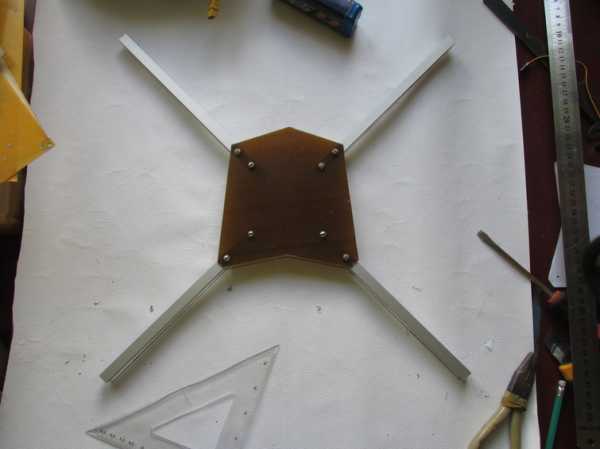
Раму для устройства вполне можно сделать самостоятельно. Для этого потребуется не так уж много материалов. Среди них кусок фанеры 150 х 150 мм, квадратный алюминиевый профиль 14 х 14 мм. Лучи можно прикрутить посредством винтов по диагоналям квадрата. Тонкую алюминиевую ленту можно использовать для создания посадочных лыж и держателя для аккумуляторной батареи. Каждый луч от центра имеет длину 300 мм, а каждая балка – 250 мм. Отверстия для двигателей на концах лучей можно сделать уже после сборки, разметив все по двигателям.

Радиоуправляемый квадрокоптер: список необходимых запчастей
- Аппаратура Turnigy 9x.
- Управляющая плата.
- Аккумулятор для аппаратуры.
- Силовой аккумулятор на сам квадрокоптер.
- Пропеллеры.
- Зарядные устройства.
Сборка квадрокоптера
Сначала требуется установить управляющую плату, и постараться поместить ее максимально близко к центру платформы. То есть тут лучше все заранее вымерять, чтобы потом не получилось каких-то проблем с балансом и прочих моментов. Отверстия сверлятся сквозь установленную ранее фанеру, прямо в концы алюминиевых лучей. Длинные саморезы по металлу используются для того, чтобы прикрутить плату непосредственно к лучам. Говоря о том, как собрать квадрокоптер своими руками, следует отметить, что лучи не стоит сверлить насквозь, так как тут аккумулятор прилегает к ним максимально плотно.
В непосредственной близости с платой требуется установить приемник. Его можно закрепить посредством суперклея. Если назначение каналов у приемника в точности совпадает с таковыми у управляющей платы, то можно сделать для них упрощенное соединение посредством двух трехжильных шлейфов.

Размещение двигателя
Если рассуждать о том, как сделать квадрокоптер своими руками, то необходимо разметить лучи и просверлить отверстия под двигатель. Расстояние от краев до оси вращения во всех случаях должно быть в точности одинаковым. Отверстие, предназначенное для хвоста вала, который торчит из дна двигателя, необходимо сверлить насквозь на всю ширину квадрата, что позволит видеть, не цепляется ли вал за его края.
Разборки с проводкой
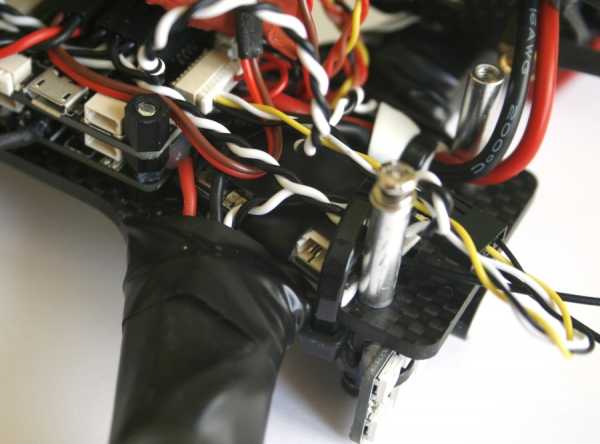
На данном этапе пришло время произвести следующие операции. Сначала делается «паук» из четырех регуляторов скорости, а их провода питания необходимо соединить параллельно посредством специальных переходников. Использовать разъемные соединения стоит только в одном месте – где осуществляется подключение батареи к «пауку». Все остальное необходимо спаять, а потом затянуть в термоусадку, так как в полете от вибрации могут случиться разные неожиданности. Теперь нужно подключить сигнальные провода драйверов в соответствии с номерами двигателей на управляющей плате.
Когда все будет собрано, можно переходить к тестированию и решению возникающих проблем.
Альтернативный вариант
Первое, что стоит сказать тем, кого интересует, как собрать квадрокоптер своими руками: не стоит экономить на деталях. Существует большое число прошивок, вариантов датчиков, готовых контроллеров, но в нашей статье будет описан вариант использования Arduino Mega, прошивки MegaPirate, а также относительно дешевых датчиков.
Детали
Для начала вам потребуется 4 мотора плюс 1 запасной. Пропеллеры тоже стоит взять с запасом, должно быть минимум 2 стандартных и 2 — обратного вращения. 4 регулятора скорости, плюс несколько запасных. В качестве источника питания не стоит брать один суперёмкий аккумулятор, так как он будет только придавать лишний вес устройству. Правильнее всего предпочесть несколько мелких, чтобы менять их по очереди. Рама должна быть максимально прочной и легкой. Вариант, описанный выше, можно назвать вполне подходящим. В качестве мозгов и датчиков устройства можно использовать программируемый микроконтроллер, плата — AllInOne, акселерометр, гироскоп, управляющая арматура, аккумуляторы, зарядное устройство, а также многое другое. Под последним следует понимать необходимое количество болтиков, винтиков, проводочков, стяжек. Вам потребуются также инструменты для работы, такие как паяльник и принадлежности для работы с ним, дрель, а также умелые руки.
Сборка железа и его настройка
Если все, описанное выше, у вас имеется, то вполне можно начинать процессы сверления, паяния и скручивания. Раму можно делать так же, как было описано ранее, а можно проявить фантазию. Но тут важен лишь один момент: следите, чтобы расстояние от центра до концов лучей было абсолютно одинаковым, при этом пропеллеры во время вращения не должны задевать друг друга и центральную часть из фанеры, так как на ней размещаются все датчики, мозги, а также камера, если вы пожелаете. Установку датчиков следует производить на толстый скотч, резину или силикон, чтобы уменьшить вибрацию. В середине или на концах лучей можно закрепить пенопласт, плотный поролон или резиновые маячки, которые возьмут на себя функции шасси в момент приземления.
Датчики и способы их добыть
Наиболее простым из вариантов можно назвать покупку готовой платы с четырьмя основными датчиками: гироскопом, предназначенным для измерения углового ускорения; акселерометром для измерения гравитации и ускорения; барометром, который определяет высоту и удерживает квадрокоптер на ней; магнитометром, который фиксирует направление движения.
На данный момент в продаже можно найти и такие платы, на которых кроме четырех указанных датчиков есть еще и GPS-приемник, активно используемый для автономных полетов.
Сборка мозгов
Чтобы процесс монтажа стал максимально удобным, стоит все разместить на какой-то плате, выполняющей функции прототипа. Распиновка подключения зависит от типа прошивки, актуальной на момент сбора устройства, поэтому в каждом отдельном случае все следует подключать в соответствии с инструкциями.
Настройка прошивки и загрузка
Найти нужную прошивку на данный момент не представляет сложности, поэтому следует скачать подходящий архив и распаковать его. После того как прошивка в Arduino будет успешно загружена, можно осуществлять закачивание программы настройки, а потом замыкать контакт A5 с GND. Когда программа будет запущена, в меню Option следует выбрать COM-порт Arduino, а в меню Action — AC2 Setup. Важно, чтобы настройка квадрокоптера прошла успешно, а для этого вам необходимо четко следовать инструкциям, которые появятся перед вами после нажатия на огромную кнопку. В одном окошке от вас потребуется двигать ручки на пульте до максимальных и минимальных значений, а в другом окне появится просьба убедиться, что прибор стоит ровно, чтобы верно откалибровать датчики.
Дальнейшие работы

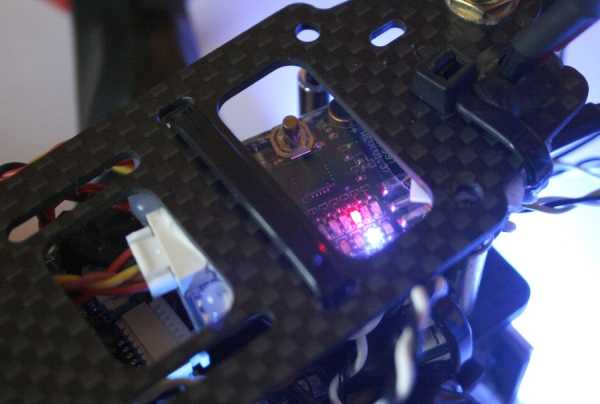
Управление квадрокоптером настраивается после калибровки. После того как вы завершите настройку, A5 с GND можно разомкнуть, а потом в меню найти пункт AC2 Sensor, где вы сможете проверить, правильно ли работают датчики, во вкладке Raw Sensor. Каждый поворот платы с датчиками должен отрабатываться максимально четко, то есть как повернули, так стрелка и становится, если она не дотягивает или переходит нужное значение, то у вас проблемы либо с датчиком, либо с коэффициентами в коде.
Нужно проверить и работу приемника. Делается это в соседней вкладке. Если движение уровней правильное, то при отклонении джойстика газа на 2 секунды вниз вправо должен светиться красный светодиод. При медленном движении того же манипулятора вверх в левом столбце должно происходить примерно одинаковое отклонение уровней.
Результат
Когда все прошло проверку, можно крепить пропеллеры, а потом попробовать взлететь. Для этого квадрокоптер стоит разместить подальше от себя, наклонить вниз и вправо левую ручку, а потом медленно добавить газа. Если прибор взлетел, это очень хорошо, а если он трясется, то придется настраивать PID. Это осуществляется в пункте PID Config. Делается это все в каждой ситуации индивидуально, то есть нет какого-то универсального решения. Теперь вам известно, как собрать квадрокоптер своими руками.
fb.ru
Как сделать квадрокоптер своими руками
Первые испытания летательного аппарата мультикоптера произошли еще в 1922-ом, но только во второй декаде XXI в. этот тип компоновки начал с внушительными темпами набирать популярность. В сравнении с другими радиоуправляемыми моделями квадрокоптеры пользуются большим спросом, вероятно, потому что имеют практическое назначение: как минимум, съемка красивых кадров с воздуха.
Следуя запросам потребителей, производители наводняют рынок обилием моделей различной конфигурации с разнообразными характеристиками. Многие покупатели предпочитают RTF (ready-to-fly, готовый к полетам) наборы, которые способны подниматься в воздух после несложной калибровки.
Но легкие пути нужны далеко не всем. Особое удовольствие можно извлечь, собрав квадрокоптер с ноля своими силами. Степень сложности варьируется от наборов со всеми необходимыми деталями для сборки до самостоятельно выбора каждого компонента, проверки их совместимости, сборки и настройки собственного БПЛА.
Собрать квадрокоптер имеет смысл и при наличии специфических сценариев применения, к которым заводские модели не приспособлены. Или собрать самому аппарат для обучения полетам, который не жалко будет разбить. Подробный чертеж для этого не понадобится, достаточно эскиза, на котором отмечены все элементы.

Базовые узлы и компоненты
Чтобы построенный аппарат был способен подниматься в воздух хотя бы в теории, а сборка квадрокоптера своими руками доставляла удовольствие, необходимо приобрести ряд соответствующих компонентов:
- Полетный контроллер – «голова» будущего БПЛА, в которой установлены все базово необходимые датчики, а также программное обеспечение для обработки их показаний, а заодно и команд, приходящих с пульта управления, контроля скорости вращения каждого двигателя. Это самый дорогой компонент, который придется покупать, чтобы собрать квадрокоптер.
- Раму продвинутые моделисты делают самостоятельно из тщательно выбираемых материалов (алюминий, пластик, дерево, карбонат или их комбинации). При недостатке опыта или инженерных познаний, если проекту больше подходит готовая рама или нет ни желания, ни времени проектировать квадрокоптер и его части самому, то на помощь придут готовые рамы, производимые в широком спектре размеров.
- Двигатели лучше выбрать бесколлекторные – они несколько дороже, но гораздо надежнее коллекторных. Для полетов необходимо вращение со значительной скоростью, поэтому отсутствие коллектора положительно сказывает на сроке эксплуатации. Приобретается не менее 4 (или 8, если нужен октокоптер), если бюджет позволяет, то с 1-2 запасными.
- Контроллеры двигателей это платы, регулирующие скорость вращения каждого двигателя и питающие его, будут смонтированы на «лучах» корпуса. Их количество соответствует количеству двигателей.
- Пропеллеры или движители следует выбирать с особым вниманием, ведь размер должны подходить к габаритам будущей рамы, независимо от того, что она самостоятельно построена или куплена.
- Плата распределения питания предназначена для разводки питания с аккумулятора на контроллеры оборотов двигателей. Как правило, каждый покупной корпус снабжается небольшой платой, куда можно припаять вводы со всех котроллеров, а затем аккуратно их запитать. При желании можно заказать более продвинутый вариант основной платы питания если ваша схема квадрокоптера предполагает особенности компоновки.
- Покупка аккумуляторов – один из самых непростых моментов подбора запчастей. Тип подходящего элемента питания полностью зависит от целевого назначения создаваемой модели. Для быстрых моделей лучше брать небольшие батареи с высокими показателями KV (количество оборотов в минуту × Вольт), а для тихоходных аппаратов для съемок в приоритете соотношение емкости и веса, ведь перегружать конструкцию нельзя в любом случае. Полезное дополнение – монитор заряда батареи. Не обойдется и без специального балансирующего зарядного устройства для выбранного типа аккумуляторов (литий-ионные или литий-полимерные).
- Пульт управления с модулем ресивера, который подключается к полетному контроллеру, чтобы аппаратом можно было управлять. От типа пульта управления зависит комфорт управления и некоторые другие доступные функции.
- Дополнительные опции выбираются в зависимости от назначения будущего аппарата. Так, на дроны для съемки часто крепят стабилизаторы камер, а гоночные невозможны без комплекса FPV (first person view, вид от первого лица).
Инструментов для сборки понадобится немного – отвертка для сборки рамы, паяльник и, естественно, навыки работы с ним.
Недостаток последнего несложно устранить в процессе сборки, благо, «высший пилотаж» владения паяльной станцией не нужен. И лучше использовать паяльники с тонким жалом.

Чертежей квадрокоптеров в полном смысле этого слова не существует, да они и не нужны. Сборка из модулей исключает подобную потребность. С расходными материалами все немного сложней. Чтобы собрать квадрокоптер своими руками понадобятся:
- Фиксатор резьбы, чтобы ни один из винтов не выкрутился от полетных вибраций.
- Термоусадочная изоляция на каждое место пайки.
- Полимерные затяжки-хомуты для фиксации элементов на корпусе.
- Гидроизолирующий состав для печатных плат.
- Коннекторы типа «банан» для двигателей.
Ничто не помешает внести необходимые правки и доработки в конструкцию в процессе сборки или летных испытаний. Может для поставленных целей лучше собрать октокоптер своими руками. При наличии внимательности и осторожности даже самые технически неграмотные любители аппаратов смогут построить летающего дрона. Более того, летные испытания в дальнейшем выявят все недостатки, которые устранятся. В результате должен получится идеальный персональный дрон. Главное – четко представлять сценарий его применения.
Процесс сборки
Существует масса вариантов компоновки и конструкции мультикоптеров, но наиболее распространены именно модели с четырьмя винтами. Поэтому сборка такого квадрокоптера послужит примером для поэтапного обзора процесса сборки. В процессе можно опираться на примерные чертежи квадрокоптеров из сети или составленные самим.
1: Строим раму
Независимо от габаритов или назначения каждый дрон должен иметь раму, каркас, несущую основу. Сборка готовых рам не должна вызывать сложностей ввиду того, что они снабжаются подробными инструкциями и всем необходимым крепежом.

А чтобы собрать раму самому, придется проявить конструкторские способности. Самостоятельно изготовленная рама квадрокоптера из металла, пластика, металлопластика или дерева должна быть достаточно прочной. К примеру, толщина деревянных частей каркаса, изготовленного своими руками, должна быть не менее 30 мм. Сборка своего квадрокоптера на недостаточно прочной раме – пустые усилия, потому что он будет часто ломаться.
В любом случае на выходе должно получиться заданное количество лучей одинаковой длины, которые несут на себе моторы и крепятся к центральной несущей пластине. На ней же установлены посадочные опоры или «ноги». В некоторых вариантах компоновки ноги «растут» из-под двигателей. Все зависит от особенностей, продиктованных чертежом квадрокоптера и его рамы.
2: Монтируем силовой агрегат и пропеллеры
Двигатели, их контроллеры и пропеллеры играют ключевую роль в скорости, маневренности и других характеристиках полета. Поэтому следует выбирать продукцию брендов, тесно работающих в сфере квадрокоптеростроения, а не кого-нибудь, кто оказался в этом сегменте рынка случайно.
Моторы для одного проекта должны быть одной модели от одного производителя.
Да, движение происходит за счет разницы в скорости их вращения, но она должна быть строго контролируемой. Разношерстная компания двигателей нарушала бы баланс. Крепятся винтами на наружные концы «лучей».

После двигателей на плоскости их опор размещаются контроллеры оборотов и фиксируются стяжками. Соединение контроллеров с двигателями, также как с распределительной платой, осуществляется путем прямой пайки и коннекторов. При желании и бюджетных возможностях можно использовать контроллер 4-в-1, но тогда немного изменится схема компоновки квадрокоптера. В итоге получится почти готовый коптер, которому не хватает только полетного контроллера.
3: Устанавливаем «мозги»
Полетный контроллер, как правило, монтируется в верхней части каркаса аппарата, над распределительной платой и отсеком для батареи. Компоновку допустимо изменять, но стоит помнить, что чем ниже центр тяжести, тем устойчивей аппарат.

Для минимизации влияния вибраций на работу полетного контроллера, его монтажная площадка часто крепится на резиновые проставки или используются более хитрые системы гашения вибраций. На этапе проектирования это хорошая возможность блеснуть инженерной смекалкой, не нанеся непоправимого вреда всей конструкции.
Только после того, как контроллер будет установлен, можно размещать оставшиеся узлы и модули: ресивер от пульта управления, GPS-датчик, магнитный компас, камеру, подвес и прочее.
И только размещать на корпусе, подключение допустимо только после первичной калибровки полетного контроллера.
Различные производители выпускают разные контроллеры, пульты управление и другие компоненты. Поэтому их калибровка – сложный и вариативный процесс, достойный отдельного рассмотрения.
Пропеллеры не рекомендуется устанавливать до полной калибровки аппарата. Исключительно во избежание травм.
4: Калибровка полетного контроллера и пульта
Собранное устройство должно быть полностью откалибровано, а на пульте следует установить управление. Только после этого можно будет подыматься в воздух, не опасаясь потерять плод своих трудов. Однако точное описание процесса калибровки зависит от типа используемого контроллера и аппаратуры, поэтому следует уточнять необходимые шаги, исходя из этих данных.

Только потратив 200-300 долларов на компоненты, несколько дней на сборку, настройку и калибровку, можно наконец отправляться в полет на собственноручно построенном квадрокоптере. Нельзя не отметить, что за те же деньги доступны вполне функциональные серийные модели. Но дело ведь не в этом.
Приведенная выше инструкция достаточно поверхностна, но она дает очертания того, с чем придется столкнуться, чтобы квадрокоптер собрать. Постепенные уточнения помогут накопить хорошую теоретическую базу для последующего развития.
Подводя итоги, нужно отметить, что самостоятельно построенные дроны уступают в характеристиках моделям заводского производства, особенно если первые – дело рук начинающего конструктора.
Вот только дело в том, что самодельный квадрокоптер и не стремится конкурировать с титанами рынка. Это выбор для тех, кто любит погружаться в интересующую тему, конструировать или совершенствовать конструкции.
Собираем квадрокоптер своими руками
Рейтинг 5/5 (1 голосов)my-quadrocopter.ru
Квадрокоптер своими руками

Первый квадрокоптер, как известно, появился в 2006 году. Собрали дрон германские разработчики Бускер и Бусс, причем сделали это сами. И началось: многие инженеры по всему миру загорелись идеей создания собственных моделей квадрокоптера. Есть такие умельцы и сегодня. Хотите собрать свой квадрокоптер и вы. А иначе стали бы читать сейчас этот материал?
Рекомендуем почитать: из чего состоит квадрокоптер
С чего же начать чтоб сделать квадрокоптер своими руками?
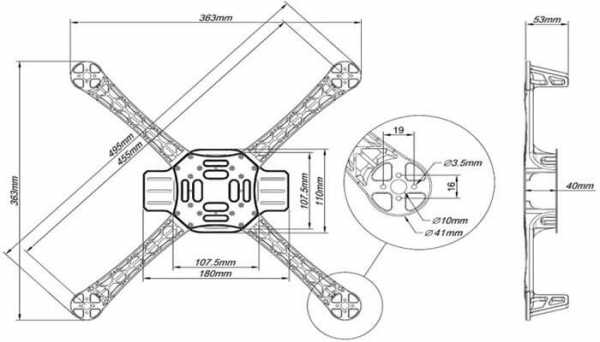
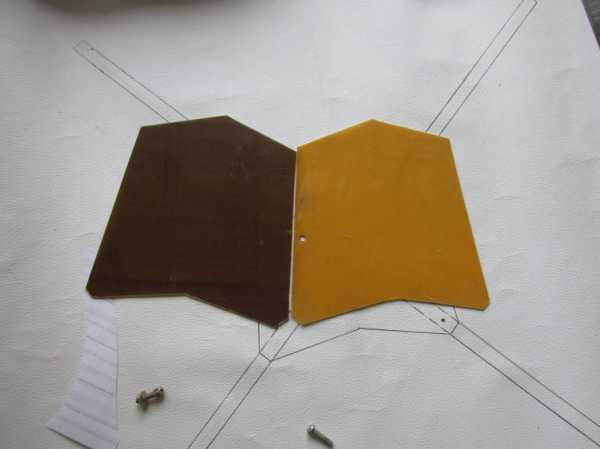
1. Рама. Ее можно сделать без особого труда из пластиковых труб небольшого диаметра, используемых в прокладывании канализационных и иных коммуникаций. Можно изготовить раму из куска фанеры. Понадобится квадрат 110 на 110 мм. Кроме того, потребуется алюминиевый профиль (квадратный). Лучи (длиной по 495 мм) прикрепляются винтами по обеим диагоналям получившегося квадрата. Возможна покупка готовой рамы (рис. снизу).\

Из алюминия невысокого профиля можно сделать посадочные «лыжи» коптера. Из него же можно соорудить держатель для аккумулятора.
2. Далее потребуются аппаратура, допустим Turnigy 9XR, управляющая плата и аккумулятор для аппаратуры. Плюсом к тому необходимо приобрести силовой Li — Po аккумулятор (для самого квадрокоптера), пропеллеры, устройство для подзарядки аккумуляторов.

3. Первым делом устанавливается управляющая плата – в центральную часть платформы из получившегося куска фанеры или карбона. Делается это в пазы, непосредственно просверленные в алюминиевой основе через фанеру.
4. Рядом с платой устанавливается приемник (можете сделать это при помощи суперклея). Далее сверлятся отверстия для крепления двигателя. При этом нужно учитывать, чтобы расстояние от края до оси во всех четырех случаях было равным.

5. Затем необходимо сделать «паука» из проводов – от регуляторов скорости. Проводку требуется соединить параллельно с помощью соответствующих переходников. Разъемы при этом можно использовать в том месте, в котором подключается аккумулятор к «пауку».
6. Все требуется спаять, сделать термоусадку, подключить провода (сигнальные). Для начинающих это будет большой проблемой.
7. Можно тестировать получившийся квадрокоптер.
Умельцы, которым уже доводилось успешно собирать квадрокоптеры, советуют не экономить на комплектующих. Особенно важным это замечание является сейчас, когда на рынке представлено немало различных микроприборов, в том числе контроллеров и датчиков. Каждый может использоваться при собственноручном производстве дрона, но не каждый может оправдать ожидания разработчика.
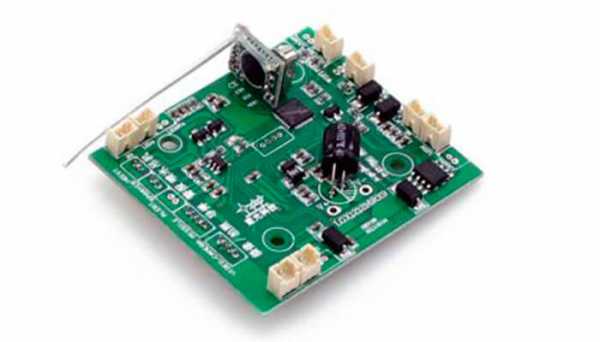
Самый простой вариант – приобрести готовую плату с уже установленными датчиками (гироскопом, акселерометром, барометром, магнитометром).
Для чего они нужны?
Гироскоп необходим для контроля углового ускорения, акселерометр замеряет гравитацию, барометр отвечает за набранную высоту, а магнитометр – за направление движения. Сегодня на рынке представлены платы, в которых есть также и GPS-принимающие.
Советы
Перед сборкой квадрокоптера своими руками советуем ознакомиться с советами профессионалов (тех, кто не раз делал дроны сам), ведь для начинающих это будет не так уж и просто:
- Первый «дрон» не должен быть с камерой для фото- или видеосъемки, он – ваша первая работа, задача которой – взлететь, уверенно держаться в создухе и не сломаться при первом же полете;
- Не гонитесь за масштабами. Лучше построить менее крупный и громоздкий, но рабочий квадрокоптер;
- Старайтесь использовать минимум соединений и дополнительных элементов. Множество датчиков и контроллеров оправдано далеко не во всех случаях,
- Если вы все же решились сделать квадрокоптер своими руками с камерой, то знайте, что для высокого качества картинки потребуется основание более крупных размеров. «Усадить» её на устройство намного сложнее, да и в целом конструкция с ним становится менее устойчивой и крепкой.
Если у вас нет времени на сборку или просто терпения, советуем почитать как сэкономить и где выгоднее купить квадрокоптер.
Будем благодарны Вам, если поделитесь с друзьями:
mykvadrocopter.ru
Квадрокоптер своими руками. — Квадрокоптеры и радиоуправляемые модели.
Как собрать квадрокоптер своими руками.
Купить готовый квадрокоптер является самым простым вариантом для того, чтобы стать владельцем четырёхвинтовой летающей модели. Для тех, кто не ищет легких путей и желает получить удовольствие от процесса сборки, лучшим вариантом будет собрать квадрокоптер своими руками.
Процесс сборки квадрокоптера состоит из 6 шагов:
- Составления плана и бюджета сборки согласно требованиям и желаемому финальному результату, просчет характеристик оборудования с помощью специально калькулятора, либо просто посидеть на нашем форуме и пообщаться с опытными моделистами, которые помогут с выбором деталей;
- Поиск оптимальных магазинов по соотношению цена-качество,
- Выбор и покупка необходимых комплектующих;
- Подготовка комплектующих перед сборкой;
- Сборка и настройка и тестирование квадрокоптера.
- Пробные полеты и при необходимости коррекция.
При наличии минимального опыта количество шагов можно сократить до двух.
О том, что нужно иметь минимум навыки управления коптером, думаю, говорить не нужно. Если таковые отсутствуют нужно потренироваться на тренажере либо купить недорогой квадрокоптер, который устойчив к падениям и не может причинить много вреда окружающим в руках неопытного пилота.
В данной статье мы рассмотрим только 2 пункт.
Итак, чтобы собрать квадрокоптер своими руками нам необходимо:
- Рама для квадрокоптера. Основными критериями которой являются размер, материал изготовления и функционал.
Самые распространённые — это рамы 450 размера(450 мм от двигателя до двигателя) с длинными ногами, применяются чаще для съемок с использование подвеса. А также компактные рамы 250 размера, на них чаще всего строят квадрокоптеры для FPV полетов и скоростных гонок.
Материал, из которого сделана рама предпочтительнее карбон. Он легкий и прочный. Но и самый дорогой из всех доступных материалов. Далее идет стекловолокно и пластик. Оба эти материала уступают по весу и прочности карбону и стоят на порядок дешевле.
Функционал который может присутствовать на раме это встроенная плата питания (PCB) с габаритной LED подсветкой. Площадка для крепления камеры. Складные лучи. В последнее время стали производить рамы со складными ногами, отсеками под регуляторы оборотов, креплениями под контроллер полета. - Бесколлекторные двигатели для квадрокоптера. Из основных характеристик, помимо размера моторов, можно выделить скорость вращения и поднимаемый вес.
- Регуляторы оборотов двигателя (ESC). Отличаются по силе тока (12, 20, 30… ампер) виду прошивки (SimonK, bHeli) и наличию или отсутствию BEC выхода с напряжением 5 вольт для питания необходимого оборудования. Также есть показатель 2-4S, который означает количество банок аккумулятора с которыми совместим данный регулятор.
- Контроллер полета квадрокоптера. Оптимальным является OpenPilot CC3D. Также стоит рассмотреть Naze 32 (Flip32) и APM. По функционалу как по стоимости данные контроллеры отличаются незначительно.
- Аппаратура управления с приемником. Бюджетными и вполне функциональными являются пульты от FlySky. Они дают дальность около 1 км и весь необходимый базовый набор функций. Более дорогие и навороченные – FrSky с телеметрией. Также существуют менее распространенные Futaba и RadioLink. Новичку без вариантов стоит брать FlySky, например среднюю модель FlySky i На вырост лучше присмотреть что- то уровня Taranis от FrSky.
- Li-Po аккумулятор для квадрокоптера. Главными показателями которого являются напряжение зависящее от количества банок, ячеек батареи (1 банка = 3.7V, 3 банки = 11.1 вольт), ток разряда (25С, 30С, 40С и тд.), емкость (например 2200 mAh) и конечно вес элемента питания. Чем выше емкость и ток разряда тем выше вес. Задача выбрать оптимальное соотношение этих показателей. Аккумулятор часто является самым тяжелым элементом квадрокоптера. И если его вес выше допустимого предела – квадрокоптер просто-напросто не сможет оторваться от земли.
Для зарядки данного типа аккумуляторов необходимо профессиональное балансировочное зарядное устройство типа IMAX B По началу, для экономии бюджета можно обойтись более простым вариантом, к примеру IMAXRC B3. - Пропеллеры для квадрокоптера (винты). Различаются по размеру (50×30, 60×30 и тд.), материалу изготовления (пластик либо карбон) а также виду крепления (с помощью цанги, гайки или болтов). Для первых полетов, а также полетов вблизи препятствий подойдут обычные пластиковые пропеллеры. Лучше их купить с запасом. Для съемок и высшего пилотажа нужны карбоновые. Размер и тип крепления зависит от размера рамы и типа крепления на двигателях.
- Также необходим базовый набор инструментов для сборки и расходные материалы. Желательно в запасе иметь кусок провода, разъем XT60 для подключения аккумулятора, термоусадку, двухсторонний скотч, нейлоновые стяжки и ленты-липучки.
Этого набора достаточно для сборки готового к полетам коптера. Далее при необходимости можно делать апгрейд квадрокоптера установив FPV оборудование, GSP навигацию, габаритную LED подсветку, отдельный BEC для питания контроллера полета, плату распределения питания и так далее. В зависимости от ваших требований и возможностей бюджета.

Квадрокоптер с камерой своими руками.
Собранный своими руками квадрокоптер с камерой позволит снимать фото и записывать видео во время полете. Для установки камеры на коптер понадобится подвес либо демпферная площадка. Наилучшим решением для получения стабильной картинки является бесколлекторный подвес, он же самый дорогой вариант крепления бортовой камеры. Демпферная площадка поглощает лишь часть вибраций. Картинка приемлемая но не идеальная. В то же время совсем без виброгасящего устройства качество видео оставляет желать лучшего. Камеру можно использовать как бюджетную (Mobius, Xiaomi и тд) так и профессиональную зеркальную. Всё зависит от размера и грузоподъемности дрона.
Сборка квадрокоптера своими руками.
Как мы видим из данной статьи сборка квадрокоптера своими руками является довольно интересной и увлекательной задачей. Которая сможет принести массу приятных впечатлений не только опытному хобби моделисту, а и новичку в области сборки авиамоделей.
Свои вопросы задавайте в комментариях.
quadrc.ru
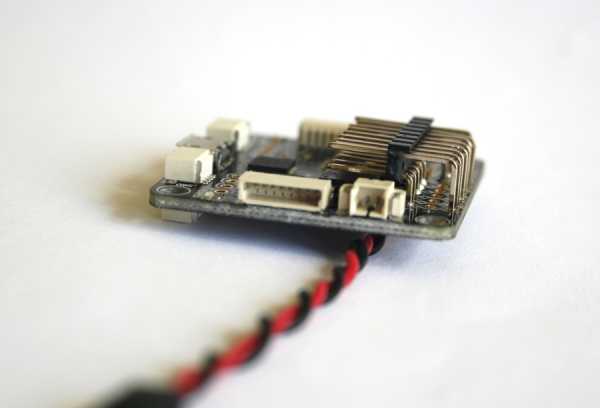
Гоночный FPV-дрон своими руками (часть 1) — сборка / Хабр
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.
Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX h3205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель.
- MICRO MinimOSD.
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
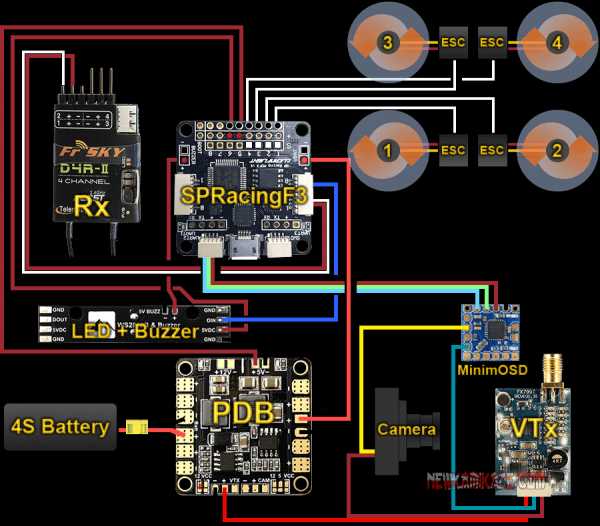
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).
Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
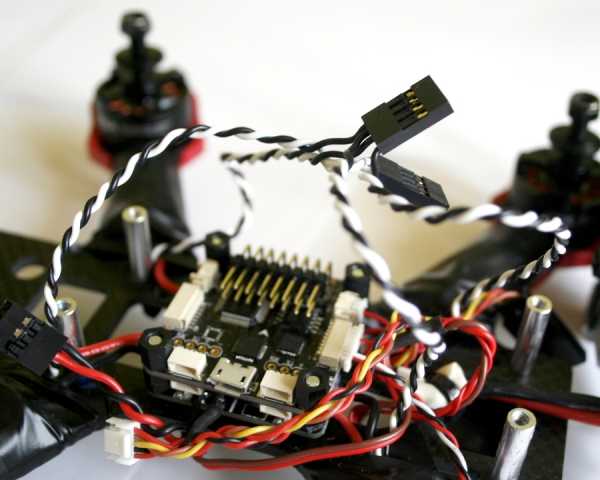
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.

Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.

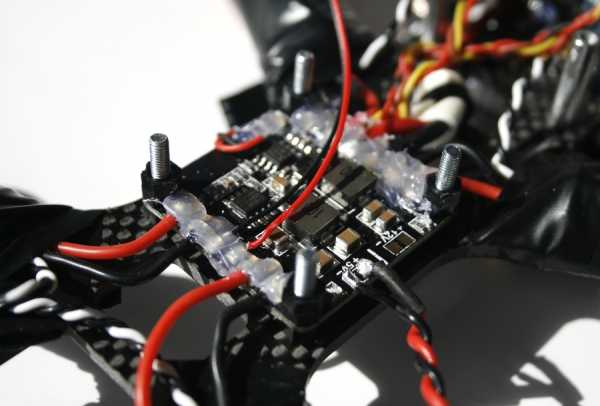
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
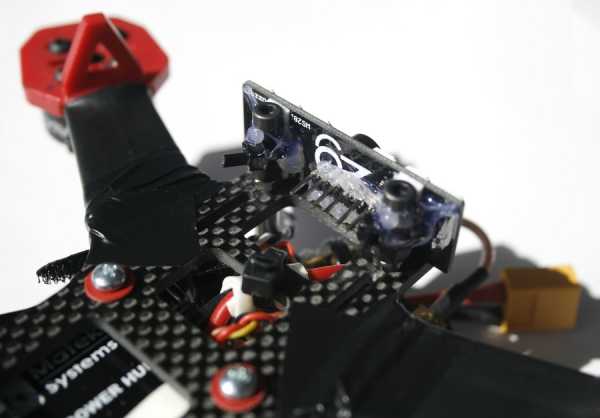
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
habr.com
Квадрокоптер своими руками из подручных материалов. — Паркфлаер
Всем доброго времени суток! Хочу вам рассказать о том, как я строил свой первый квадрокоптер, в каком он сейчас состоянии и мои дальнейшие планы на него. Сначала, подобрав размер квадра, приступил к зарисовке чертежа на куске обоев.
Сначала, подобрав размер квадра, приступил к зарисовке чертежа на куске обоев. Кстати, размер выбрал 45 — универсальный, так как это мой первый дрон, и в каком направлении буду развиваться пока не знаю.
Собрав дома весь стеклотекстолит, приступил к выпиливанию двух одинаковых основ, между которыми будут зажаты лучи.
Материалом для изготовления лучей послужил алюминиевий квадратный профиль 10*10мм

Предварительная версия…
Крепил лучи между основами с помощью винтов и гаек, ничего другого не придумал)
 Идём далее…
Идём далее…
Ноги, шасси делал также из стеклотекстолита. Нарисовав эскиз, приступил к нарезке заготовок
 После чего приступил к мучению шуруповёрта
После чего приступил к мучению шуруповёрта Несмотря ни на что, дрон всё-таки встал на свои ноги)
Несмотря ни на что, дрон всё-таки встал на свои ноги)
 А теперь — взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
А теперь — взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
Теперь, когда рама собрана, можно приступить к установке комплектующих.
Моторы и регули я выбрал эти:
 EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC
EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC
Товар http://www.parkflyer.ru/ru/product/1669970/
Мозг, всем известный cc3d
CC3D Flight Controller
Товар http://www.parkflyer.ru/ru/product/1531419/
Батарея:
Аккумулятор литий-полимерный ZIPPY Flightmax 3000mAh 3S1P 20C
Товар http://www.parkflyer.ru/ru/product/8851/
Моторы со штатными крестиками крепил к лучам на болты и гайки 

 Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.
Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.

 Затем плату распределения питания разместил между пластинами стеклотекстолита
Затем плату распределения питания разместил между пластинами стеклотекстолита
Припаял все нужные провода (регуляторов, габаритных огней).
Перфекционистам не смотреть)))
Проверил работоспособность…
Установив плату распределения питания, приступил к монтажу мозгов. Банально прилепил их на 2-х сторонний скотч.
Также поступил с приемником
Крепление батареи осуществляется благодаря липучкам на нижней основе квадра. Вот и всё! Полётный вес квадрокоптера — 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Вот и всё! Полётный вес квадрокоптера — 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Видео полётов смотрите с 2.50 минуты
Квадрокоптер был построен в конце лета 2016, сейчас начало 2017г. За этот период квадрокоптер побывал в небе достаточное количество времени. В данный момент коптер цел, не было ни одного краша, я его немножко модернизировал, для установки камеры на его борт. В дальнейшем хочу на нём научится летать по fpv. Сейчас потихоньку начинаю собирать Fpv систему, видеопередатчик, приёмник уже заказал))
Спасибо всем кто читал выше изложенное, если есть вопросы, советы, пожелания — пишите в комментариях. Ниже представлены фотографии сделанные камерой, установленной на квадрокоптере, ну и сам коптер.
С Ув. Алексей







 15.01.17
15.01.17




www.parkflyer.ru
Квадрокоптер своими руками: пошаговая сборка
Главная причина того, что люди интересуются сборкой квадрокоптеров является желание сэкономить на покупке оригинального устройства. Однако это не единственная причина. Многие интересуются этим вопросом, поскольку хобби управления БПЛА перерастает в нечто большее, например, в участие в гонках квадрокоптеров, а выиграть в них возможно только максимально часто практикуясь, и дорабатывая конструкцию своего летающего дрона.
Сборка готового комплекта
Больше всего шансов собрать своими руками квадрокоптер у тех, кто действительно этого желает. Чтобы эту задачу упростить до элементарной сборки необходимо обзавестись соответствующим комплектом деталей. Их стоимость в разы ниже, чем у квадрокоптеров в стиле RTF. Причина этому то, что на плечи пользователя возлагается не только сборка конструкции, но и прошивка, калибровка и точная настройка устройства. Главным преимуществом таких комплектов является то, что подбирать мощность моторов, чипов и веса корпуса не приходится.
Также нет смысла беспокоиться о сбалансированности конструкции, что непосредственно влияет на поведение устройства в воздухе. При этом квадрокоптер будет обладать всеми запланированными характеристиками, включая скорость и время полета. Выбирая комплект, можно выбрать, будет квадрокоптер монолитным или разборным, т.е. модульным. Последний вариант больше заинтересует тех, кто хочет иметь достаточно габаритную, но в то же время легко переносимую модель. Стоит отметить, что подобные модели зачастую имеют весьма агрессивный и малопривлекательный дизайн.
Все потому, что в состав комплекта не входит внешний корпус, который выполняет и защитную и декоративную функции. Последовательность сборки подобных конструкций указывается в инструкциях, прилагаемых к комплектам деталей. Обычно сборка таких квадрокоптеров начинается с установки на экзоскелет, выполненный из пластика, металла или карбона, комплектных моторов. Вслед за ними устанавливаются PIN-кабели, выполняющие роль регуляторов мощности для установленных моторов. Далее на корпусе закрепляется приемник сигнала и главный мозговой центр – управляющий модуль.
В завершении сборки устанавливается аккумулятор, фиксаторы, светодиоды и прочие модули, отличающие модель от прочих. На этом пошаговая сборка заканчивается, и начинается все самое интересное, а именно процесс прошивки устройства, его калибровка и тонкая настройка, которая в зависимости от производителя комплектующих может составлять от получаса до трех часов. Важно, чтобы на момент прошивки аккумулятор был полностью заряжен. В противном случае этот процесс может завершиться неудачей.
Сборка из подручных материалов
Как ни прискорбно, но все же собрать полностью из подручных материалов полноценный квадрокоптер не получится. В любом случае придется закупать комплект из деталей. Но их можно покупать и не целым комплектом, а взять лишь самые необходимые. К ним относятся моторы, винты, управляющая плата с приемником и аккумулятор.
Это все что необходимо для того чтобы просто поднять квадрокоптер в воздух и управлять им с помощью аппаратуры. Для того чтобы в воздухе этот набор комплектующих элементов не развалился на куски, требуется закрепить их на прочном, но легком корпусе. Сделать его можно из подручных материалов. В ход может пойти все что угодно, начиная от палочек для мороженого до пластиковых крышек и бутылок.
Что касается дополнительных покупок, то понадобится также приобрести аппаратуру, поскольку без нее управлять собранным устройством будет чрезвычайно сложно. Схему квадрокоптера можно найти в сети, либо придумать самостоятельно. При создании корпуса, стоит помнить о полетных качествах, равновесии, устойчивости и легкости конструкции.
В противном случае устройство может превратиться не в БПЛА, а в ползающий мини вентилятор с дистанционным управлением. Дорабатывать созданную конструкцию можно будет бесконечно, поэтому при первой сборке можно особо не стараться, чтобы в процессе работы не потерять интерес.
Чтобы техническая часть была максимально сбалансированной без применения сложных расчетов, можно воспользоваться небольшой хитростью. Можно выбрать конкретную распространенную модель и заказать под нее комплектующие материалы из базового списка. При заказе важно правильно указать детали. Так, в списке заказа должны присутствовать по 2 мотора правого вращения, и левого вращения.
В пару к ним должны быть соответствующие винты – правосторонние и левосторонние. В противном случае устройство не будет функционировать. Всегда существует вероятность того, что при сборке деталей могут попасться бракованные заготовки, поэтому некоторые можно заказать даже в двойном экземпляре на случай замены. В отличие от заводских kit-наборов, описанных выше, из обычных деталей голыми руками и отверткой собрать такое устройство не получится. Придется поработать с паяльником, клеевым пистолетом, изолентой и двусторонним скотчем.
Только таким способом удастся получить желанный квадрокоптер. После того, как будет получена рабочая модель, ее можно будет модернизировать по своему усмотрению. Добавить антенны, светодиоды, биперы (пищалки) и прочие детали, увеличивающие функциональность домашнего кварокоптера.
Пошаговая сборка квадрокоптера своими руками: главный совет
Прежде, чем с головой кидаться в сборку собственного квадрокоптера, оцените, не отрываясь от реальности, свои силы. Учитывайте не только умение работать со столь опасным инструментом, как паяльник, но и финансовые возможности, т. е. какую сумму на комплектующие к квадрокоптеру вы сможете потратить без ущерба для личного бюджета. И только после этого приступайте к активной деятельности.
Купить отличные квадрокоптеры вы можете в нашем магазине — бесплатная доставка по России и СНГ, хорошие цены!
Полезные видео о том, как собрать квадрокоптер своими руками
kvadrokopters.com
