
Энкодеры. Виды и работа. Особенности и применение
Коротко энкодеры можно назвать преобразователями угловых перемещений. Они служат для модификации угла поворота объекта вращения, например, вала какого-либо механизма, в сигнал электрического тока. При этом определяется не только угол поворота вала, но и его направление вращения, а также скорость вращения и текущая позиция относительно первоначального положения.
Наиболее популярными энкодеры стали при их использовании в системах точного перемещения, на станкостроительных заводах, в производственных комплексах с применением робототехники, в измерительных устройствах, в которых необходима регистрация точных измерений наклонов, поворотов, вращений и углов.
Виды и принцип действия
Энкодеры – это датчики поворота. Простейший датчик имеет ручку, которая может поворачиваться по часовой стрелке или против нее. В зависимости от угла поворота и направления выдается цифровой сигнал, информирующий о том, в каком положении находится ручка, либо в какую сторону она была повернута.
У такого энкодера, показанного на рисунке, ручка также может применяться в качестве кнопки. Это является вспомогательной функцией конкретного вида энкодера.
По типу выдаваемых данных энкодеры делятся на две большие группы:
- Абсолютные.
- Инкрементальные.
Абсолютные энкодеры
У абсолютного энкодера весь круг поворота разделен на определенное количество секторов, чаще всего одинакового размера. Эти сектора пронумерованы. Энкодер при работе выдает номер сектора, в котором на данный момент он находится. Поэтому он и называется абсолютным. У этого типа энкодера всегда можно определить, на какой угол относительно нулевого сектора повернут энкодер в конкретный момент, то есть, при повороте он выдает значения номеров секторов, до максимального значения. Далее он переходит снова на ноль.
Если вал энкодера поворачивать в другую сторону, то он начнет выдавать противоположные значения. В нашем случае у него используется пять выводов для выдачи значений поворота.
У данного алгоритма имеются свои недостатки. Из таблицы 1 виден порядок выдаваемых значений n-го энкодера. Стоит обратить внимание на две последние строчки, переход от 127 на 128.
Таблица 1Здесь меняются абсолютно все биты. В идеальном энкодере они все меняются одновременно и нет никаких проблем. Практически в реальном энкодере биты меняются быстро, однако не одновременно. И в какой-то момент на выходе энкодера оказывается совершенно произвольное значение. Так как меняются все биты, следовательно, у энкодера будет произвольное значение от нуля до всех единиц.
Справа изображен пример такого переключения. Чем это может грозить? Разберем пример. Микроконтроллер с помощью двигателя управляет валом и поворачивает его на определенный угол. В определенный момент при переключении со 127 на 128 ячейку он получает определенное случайное значение. Контроллер делает вывод, что вал находится совершенно в другом месте, в отличие от фактического места, и начинает его вращать в другую сторону, с другой скоростью и т.д.
Через определенное время микроконтроллер получает правильное значение, начинает пытаться остановить вал и вращать его в правильную сторону. Такой процесс может продолжаться долго, при условии, что такая ошибка будет встречаться часто. Такие ошибки являются нерегулярными, и вычислить их достаточно сложно.
Код Грея
Выше описанная проблема решается с помощью введения кода Грея. Особенностью кода Грея является то, что при переключении энкодера на единицу, значение кода Грея меняется также на единицу. Меняется только один вид. Это видно в таблице 2 в сравнении двоичного кода и кода Грея.
Таблица 2Первые две строчки совпадают, но уже во второй строчке поменялся средний бит. Далее также меняется один бит. Также стоит отметить, что последний и первый код Грея отличается на один бит, то есть код Грея может зациклиться.
Преимуществом данного кода является то, что ошибка, которая рассмотрена выше, невозможна. Из недостатков можно отметить, что микроконтроллеру необходимо переводить код Грея в двоичный код для того, чтобы понять, в каком положении находится абсолютный энкодер.
Инкрементальные энкодеры
Следующим типом является инкрементальный энкодер, который имеет более простую структуру. Но при этом он не показывает конкретное место положения своей ручки. Он показывает только направление поворота, а число делений поворота должен считать микроконтроллер.
У инкрементального энкодера есть набор полосок, которые по умолчанию подключены к земле, и при повороте они замыкаются и размыкаются. Получается сигнал, изображенный на рисунке (похож на меандр). Таких круговых полосок у энкодера две. Полоски смещены на одну четверть, и сигналы также смещены между собой на четверть. Это важно, так как позволяет определить направление вращения.
Схему инкрементального энкодера можно представить по правому рисунку. Кнопки обозначают периодические подключения энкодера к земле. Так как внутри энкодер не подключается к логической единице, то необходимо снаружи самостоятельно подтянуть логические единицы через резисторы к выводу энкодера. В этом случае, когда ни одна из ножек у энкодера не подключена к земле, на ножках будет логическая единица.
Если энкодер подключил к земле какую-то ножку, то на этой ножке будет логический ноль. В спокойном состоянии у энкодера на выходе логическая единица. При начале вращения энкодера в любую сторону, то сначала один вывод подключается к земле, затем другой. Далее эти выводы по очереди отключаются от земли, и на них опять образуется логическая единица.
Определить направление поворота можно по тому, какой из выводов раньше подключился к земле. При подсчете полных циклов можно посчитать количество щелчков поворота энкодера.
Фактически у энкодера имеется четыре состояния:
- Две единицы.
- Ноль и единица.
- Ноль и ноль.
- Единица и ноль.
Три состояния, которые не равны единицам, являются неустойчивыми, и в них энкодер не может находиться. Во многих микроконтроллерах реализована функция подсчета поворотов с помощью таймеров, у которых есть определенные входы. Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
По изменению этого числа можно определить, на сколько щелчков был повернут энкодер. По количеству щелчков можно определить и угол поворота. Энкодер также имеет дребезг контактов, который усложняет анализ сигналов.
Оптические энкодеры
Подобный преобразователь выполнен в виде диска, зафиксированного на валу, и изготовленного из стекла. Оптический датчик поворота отличается от других видов дополнительным оптическим растором, перемещаемым при повороте вала. При этом он превращает момент вращения в световой поток, который далее принимается фотодатчиком.
Оптический преобразователь запоминает углы вращения. При этом каждому отдельному положению соответствует особый цифровой код, который вместе с числом оборотов образует единицу измерения датчика. Энкодер подключается и работает по аналогии с инкрементальным датчиком.
По характеру функционирования они разделяются на фотоэлектрические и магнитные. Принцип работы магнитных основан на использовании эффекта Холла, который был впервые открыт в 1879 году. При этом разность потенциалов появляется только при расположении провода постоянного тока в магнитное поле.
По точности и свойствам разрешения магнитный вид датчика уступает фотоэлектрическому, однако по конструкции он проще, менее требователен к условиям работы и пространству. Магнитный энкодер является прибором, который фиксирует прохождение магнитного полюса магнита при вращении, находящегося рядом с чувствительным элементом. Информация передатчика выражается в цифровом коде.
Фотоэлектрический энкодер является датчиком, работающим на основе фотоэлектрического принципа. Этот эффект наблюдается при воздействии светового потока на вещество. Этот принцип был открыт в 1887 году. При эксплуатации такого датчика происходит постоянное преобразование луча света в сигнал электрического тока.
Аналогами фотоэлектрического энкодера являются оптоэлектронный, оптический и оптронный. Эти датчики наиболее чувствительны к характеристикам изготовления, эксплуатации и другим факторам, по сравнению с другими моделями. Однако это оправдывается их повышенной точностью, в отличие от конкурентов.
Похожие темы:
electrosam.ru
Что такое абсолютный и инкрементальный энкодер, как работают энкодеры
О чем эта статья
В статье вы узнаете, что такое энкодер, какие он может измерять величины. Узнаете что такое инкрементальный и абсолютный энкодер. Познакомитесь с классификацией по принципу действия. А также узнаете на какие характеристики энкодеров нужно обращать внимание при выборе. Напоследок, небольшой список производителей.
Вы также можете посмотреть другие статьи. Например, «Датчики измерения давления» или «Относительная влажность воздуха».
Что такое энкодер
Контроллер (датчик) положения вращающегося объекта или по-другому энкодер — это электромеханическое устройство, с помощью которого можно определить положение вращающейся оси (вала). В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Типы энкодеров
Выделяют следующие типы энкодеров: инкрементальные (инкрементные) и абсолютные.
Инкрементальный энкодер
Инкрементальный энкодер — это устройство, которое определяет угол поворота вращающегося объекта, выдавая импульсный цифровой код. Используется для определения скорости вращения вала (оси), когда нет нужды сохранять абсолютное угловое положение при выключении питания. То есть, если вал неподвижен, передача импульсов прекращается. Другими словами, если включить энкодер этого типа, то отсчет поворота угла начнется с нуля, а не с угла на который он был выставлен до момента выключения. Оси объекта и энкодера соединяются между собой с помощью специальной гибкой переходной муфты или жесткой втулки, либо энкодер может помещаться собственно на сам вал. Основным преимуществом инкрементальных энкодеров является их простота, надежность и относительно низкая стоимость.
Абсолютный энкодер
Абсолютный энкодер выдает цифровой код, различный для каждого положения объекта, позволяет определять угол поворота оси даже в случае исчезновения и восстановления питания и не требует возвращения объекта в начальное положение, что является несомненным преимуществом этого типа энкодеров. Так как угол поворота всегда известен, то счетчик импульсов в этом случае не нужен. Сигнал абсолютного энкодера не подвергается помехам и вибрации и тем самым для него не нужна точная установка вала. Абсолютный энкодер используется в высокоточных системах: робототехника, станки с числовым программным управлением и др.
Классификация по принципу действия
- энкодеры оптические
- магнитные
- магниторезисторные
Оптические
Рис. Схема оптического энкодера.
Конструкция оптического энкодера состоит из специального оптического диска, светоизлучающего диода и фотодетектора. Диск с нанесенной оптической шкалой (поверхность диска состоит из прозрачных и непрозрачных участков) жестко закрепляется на валу. При вращении объекта специальный датчик считывает информацию и преобразовывает ее в импульсы.
Магнитные
Рис. Схема магнитного энкодера.
Магнитный энкодер включает в себя вал с магнитом и датчиком Холла, который регистрирует последовательность прохождения магнитных полюсов (северные и южные) и измеряет скорость и направление вращения.
Магниторезисторные
Рис. Схема магниторезистивного энкодера.
Магниторезистивный энкодер состоит из катушки помещенной в магнитное поле, катушка закрепляется на валу. При вращении катушки ее витки будут изменять положение относительно поля, они будут то пералельны полю, то перпенликулярны, соответсвенно ток в катушке будут меняться. Таким образом, протекащий через катушку ток будут изменяться в зависимости от угла поворота вала.
Параметры, на которые необходимо обратить внимание при выборе энкодеров
При выборе энкодера следует обратить внимание на следующие параметры:
- Число импульсов на оборот (число бит у абсолютных энкодеров). От данного показателя зависит точность системы — чем больше импульсов тем выше точность.
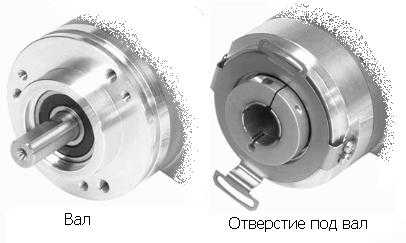
 Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.
Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.- Тип выходного сигнала энкодера (HTL, TTL, RS422, двоичный код, код Грея, и др.). Данный параметр влияет на снятие сигнала энкодера и дальнейшую его передачу..
- Напряжение питания. От этого показателя зависит работа системы и точность снятия сигнала.
- Длина кабеля или тип разъема влияют на возможности установки рабочей системы.
- Другие требования по крепежу (необходимость муфты, монтажного фланца, крепежной штанги и др.). Данный параметр влияет на устойчивость установки и тем самым на точность системы.
- Важна также степень защиты энкодера от проникновения пыли и влаги.
 Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.
Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.Производители
На российском рынке основными производителями энкодеров являются предприятия Екатеринбурга, а именно — ЗАО «Сенсор», НПП «Уралметаллургавтоматика», ЗАО «Уралчерметавтоматика». Кроме этого, выделяют НПК «ТЕКО» (г. Челябинск), СКБ ИС (г. Санкт-Петербург), Меандр (г. Санкт-Петербург), СТРАУС (г. Тольятти), Мега-К (г. Калуга) и др.
Опубликована 16-10-11.
Если вам понравилась статья нажмите на одну из кнопок ниже www.devicesearch.ru.com
Принцип работы абсолютного энкодера — RadioRadar
Научно-технические
Главная Статьи, аналитика Научно-технические
«Научно-технические статьи» — подборка научно-технических статей радиоэлектронной тематики: новинки электронных компонентов, научные разработки в области радиотехники и электроники, статьи по истории развития радиотехники и электроники, новые технологии и методы построения и разработки радиоэлектронных устройств, перспективные технологии будущего, аспекты и динамика развития всех направлений радиотехники и электроники, обзоры выставок радиоэлектронной тематики.
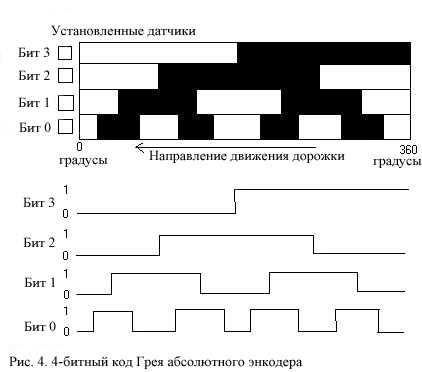
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен,т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
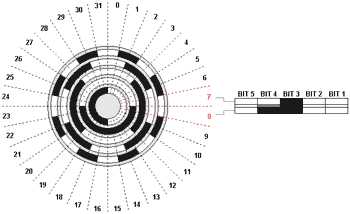
Рис. 1. Кодовый диск абсолютного энкодера
Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Двоичный код
Двоичный код — это широкораспространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Двоичный код состоит только из 0 и 1.
Построение ДК осуществляется по следующему принципу:
Таким образом выглядит в данном случае число 10 в двоичном коде.
Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
| числовое значение | двоичный код |
| 0 | 000 |
| 1 | 001 |
| 2 | 010 |
| 3 | 011 |
| 4 | 100 |
| 5 | 101 |
| 6 | 110 |
| 7 | 111 |
Отсюда видно, что для числа больше 7 при 3-разрядном коде уже нет кодовых комбинаций из 0 и 1. Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n . Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0. Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменяться несколько бит одновременно. Например, число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно, при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно. Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений (толеранцев) при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно. Это, в свою очередь, привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация. Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Код Грея
Код Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. При этом крайний правый разряд сдвинутой комбинации отбрасывается.
Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается. Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом » Complement «. Выдаваемое значение может быть возврастающим или спадающим при одном и том же физическом направлении вращения оси.
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея — выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
| Десятичный код | Двоичный код | Код Грея |
| 23 22 21 20 | ||
| 0 1 2 3 | 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 | 0 0 0 0 0 0 0 1 0 0 1 1 0 0 1 0 |
| 4 5 6 7 | 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 | 0 1 1 0 0 1 1 1 0 1 0 1 0 1 0 0 |
| 8 9 10 11 | 1 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 | 1 1 0 0 1 1 0 1 1 1 1 1 1 1 1 0 |
| 12 13 14 15 | 1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 | 1 0 1 0 1 0 1 1 1 0 0 1 1 0 0 0 |
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
Используйте такую схему для преобразования Кода Грея в двоичный код.
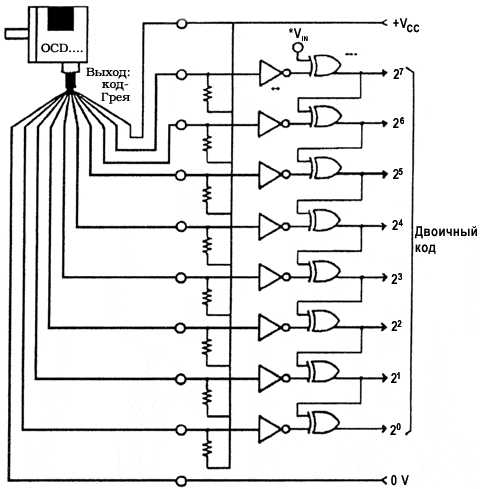
Рис. 2. Схема для преобразования Кода Грея в двоичный код
Примечание:
*Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V.
**Инвертор
***Исключающее или
Gray-Excess-Code
Обычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещяется на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализируются этим методом. Так 9-ти битный Грей-код равный 512 шагов, урезанный с обеих сторон на 76 шагов будет равен 360°.
Измерительная система абсолютного энкодера состоит из поворотной оси, монтированной на двух высокопрецизионных подшипниках, кодового диска, установленного на ось, а также опто-электронной считывающей матрицы и схемы обработки сигнала. В качестве источника света служит светодиод, инфракрасные лучи которого просвечивают кодовый диск и попадают на фототранзисторную матрицу, расположенную с обратной стороны кодового диска. При каждом шаге углового положения кодового диска темные участки кода предотвращают попадание света на те или иные фототранзисторы фототранзисторной матрицы. Таким образом, темные — светлые участки каждой из дорожек будут отображены на фототранзисторной матрице и преобразованы в электрические сигналы. Электрические сигналы, в свою очередь, подготавливаются операционными усилителями и выходными трайберами для выдачи в виде n -бит бинарного сигнала. Изменения интенсивности источника светового потока регистрируются с помощью дополнительного сенсора и компенсируются электронной схемой.
Однооборотный энкодер
Однооборотными ( Single — Turn ) датчиками называются датчики, которые выдают абсолютное значения в пределах одного оборота, т.е. в радиусе 360°. После одного оборота код является полностью пройденым и начинается опять с его начального значения. Эти датчики служат, преимущественно, для измерения угла поворота и применяются, например, в антенных системах, эксцентричных коленчатых пресах и т.д.
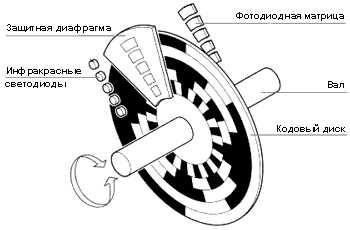
Рис. 1. Устройство однооборотного энкодера
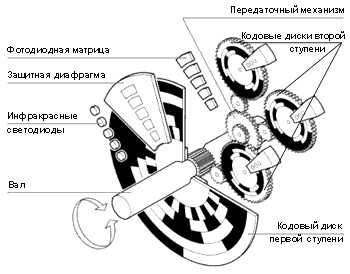
Многооборотный энкодер
Линейные перемещения предполагают необходимым применение измерительной системы с n -количеством оборотов. Например, при линейных приводах или при задачах измерения с помощью зубчатой измерительной штанги, применение однооборотных датчиков является неприемлемым. В этом случае приходят на помощь датчики, где дополнительно к измерению угла поворота в пределах одного оборота также происходит регистрация количества оборотов с помощью дополнительно встроенного передаточного механизма, т.е. своего рода редуктора из нескольких кодовых оптических дисков, образуя, таким образом, многооборотный энкодер ( Multi — Turn ).
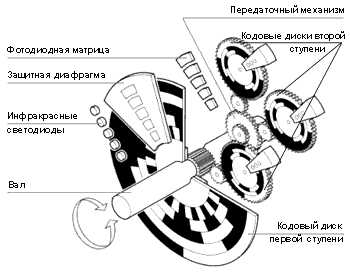
Рис. 2. Устройство многооборотного энкодера
Дата публикации: 06.07.2005
Мнения читателей
- Энко / 30.09.2017 — 15:57
Энкодерами еще называю устройства записи и чтения по картам с магнитной полосой — http://cardcoder.ru/encoders.php Кодируют и раскодируют. Как-то так. - SimonS / 08.12.2014 — 11:54
Большое спасибо. Все вроде бы понятно. Информация очень пригодилась. - Томат / 21.08.2013 — 19:51
Хорошо объяснил все, что я знал и не объяснил то, что мне нужно. Как зная код и его десятичное представление получить номер позиции энкодера? - anton / 14.11.2012 — 13:27
Спасибо,очень доходчиво.До чего только не додумается человек!!! - Rak / 24.07.2012 — 07:46
Спасибо за схему — помогла (тока мне надо на 14 бит- но принцып понятен) - Людмила / 18.06.2012 — 06:36
Можно ли использовать однооборотный энкодер для установки правки рельс - azlegend / 19.04.2012 — 19:55
Мало информации, блин ничем не помогли…завтра сдавать в универе - [email protected] / 18.03.2012 — 22:13
а что если парад планет это также Кодовый диск абсолютного энкодера, можно с помощью этого уравнение прочесть код, и расшифровать, так ради любопыство! - катя / 23.12.2011 — 05:11
а мне не чего не понятно - Вадим / 02.12.2011 — 10:15
Спасибо. Ясно и понятно всё изложено-МОЛОДЦА!!! - Vik / 10.06.2011 — 17:55
Спасибо, пригодилось! - егор / 08.05.2011 — 14:11
енкодер - / 24.04.2011 — 05:44
- Лев / 09.10.2010 — 20:04
Спасибо особенно за табличку!не мог найти)))круто)) - lamanov952 / 27.08.2010 — 02:31
Спасибо за науку.Оченьрад такой информации. - Константин / 09.04.2010 — 13:41
Спасибо автору статьи за простое и четкое изложение материала. Применяю информацию при работе со студентами. - Ivan / 05.03.2010 — 08:27
Спасибо, раньше думал что код Грея и бинарный код это одно и тоже. - megasensor / 21.08.2009 — 07:57
Авторское право этой статьи принадлежит Megasensor GmbH (http://www.megasensor.com/product_info.php/products_id/123) - roma / 01.08.2009 — 04:23
хотел бы узнать работу электросхемы и механические настройки? Заранее большое спасибо!!!!!)) - John / 03.06.2009 — 10:46
Автору спасибо. Информация очень пригодилась!
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net
Принцип работы энкодера
Энкодер представляет собой прибор, используемый для контроля технологических процессов и измерений. Устройство преобразует движение в последовательность цифровых импульсов. Последние могут быть использованы для вычисления относительных или абсолютных координат. Угловой энкодер является наиболее распространенным видом. Наряду с угловыми энкодерами на рынке измерительных устройств представлены и линейные энкодеры.
В конструкцию угловых энкодеров входят:
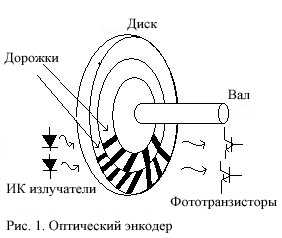
1) Диск, для изготовления которого как правило используются стекло или пластик. На диске имеются затемненные и прозрачные участки, которые пропускают излучение, испускаемое источником света или инфракрасными излучателями. В большинстве случаев эти прозрачные и затемненные участки расположены на дорожках диска радиально (рис. 2).
2) Оптический датчик (это могут быть фототранзисторы или фотоэлементы), который генерирует цифровые импульсы в результате прохождения или непрохождения света от источника через секции на диске, который вращает вал.
По типу конструкции энкодеры классифицируются на абсолютные и инкрементные (относительные).
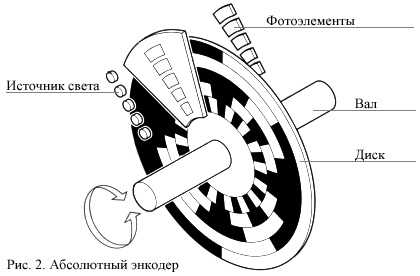
Конструкция диска абсолютного энкодера показана на рисунке 2. Этот энкодер выдает числа, которые соответствуют N количеству секций на диске. Например, если на диске имеется 4 дорожки, то он будет включать в себя 16 неповторяющихся по положению участков с радиальным разрешением 22,5 градусов (360/16 = 22,5). Такое расположение затемненных и прозрачных участков позволяет получить не очень точные данные, однако является удобным для примера. Очевидно, что точность будет увеличиваться с большим количеством дорожек.
На диске с 8 дорожками можно расположить 256 участков, которые дают радиальное разрешение 1,406 градусов.
Вернемся к примеру с 4 дорожками. Наиболее распространенным числовым кодированием, которые используют абсолютные энкодеры, является бинарный или циклический двоичный код, показанный на рисунке ниже. На нем можно увидеть изображенный в форме прямоугольника диск. В нижней части этого рисунка показан преобразованный фотоэлементами свет.
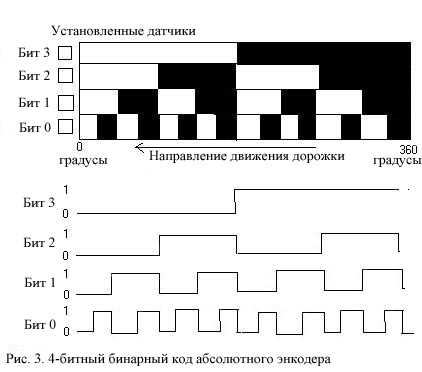
Данные таблицы демонстрируют взаимосвязь углового смещения и выходных данных энкодера. Обратите внимание на то, что циклический двоичный код был подобран таким образом, чтобы от одного сектора к другому менялся только один бит.
Десятичный код | Диапазон углов поворота (градусы) | Бинарный код | |
| 0 | 0–22.5 | 0000 | 0000 |
| 1 | 22.5–45 | 0001 | 0001 |
| 2 | 45–67.5 | 0010 | 0011 |
| 3 | 67.5–90 | 0011 | 0010 |
| 4 | 90–112.5 | 0100 | 0110 |
| 5 | 112.5–135 | 0101 | 0111 |
| 6 | 135–157.5 | 0110 | 0101 |
| 7 | 15.75–180 | 0111 | 0100 |
| 8 | 180–202.5 | 1000 | 1100 |
| 9 | 202.5–225 | 1001 | 1101 |
| 10 | 225–247.5 | 1010 | 1111 |
| 11 | 247.5–270 | 1011 | 1110 |
| 12 | 270–292.5 | 1100 | 1010 |
| 13 | 292.5–315 | 1101 | 1011 |
| 14 | 315–337.5 | 1110 | 1001 |
| 15 | 337.5–360 | 1111 | 1000 |
Когда в бинарном коде меняется больше чем один бит, появляется вероятность получения коэффициента неопределенности. Причиной этого может быть тот факт, что некоторые участки на диске были подвергнуты изменениям, а некоторые — нет.
Инкрементный энкодер (относительный) имеет более простой дизайн по сравнению с конструкцией, которую имеет абсолютный энкодер. Базовая конструкция предполагает наличие только двух дорожек на диске и двух датчиков, имеющих два выхода — A и B каналы. В некоторых случаях может быть использован и третий канал, который называется индексным. За один оборот он дает один импульс.
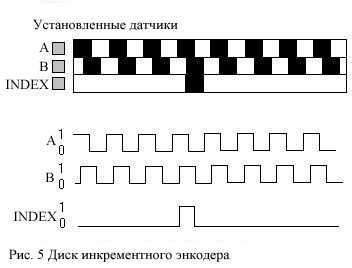
На рисунке 5 видно, что диск сконструирован таким образом, чтобы 1 канал опережал другие на ¼ вращения. Направление вращения определяется при помощи мониторинга соотношения импульсов, генерируемых каждым из каналов, а скорость — частоты этих импульсов.
www.telemaster.info
Принцип работы абсолютного энкодера
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен, т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
Я уже писал об терминологии абсолютных энкодоров. Теперь о принципе работы этих сенсоров.
Кодовый диск абсолютного энкодера
Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером, если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Двоичный код
Двоичный код — это широкораспространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Двоичный код состоит только из 0 и 1.
Построение ДК осуществляется по следующему принципу:
1x23 + 0x22 + 1x21 + 0x20
Таким образом выглядит в данном случае число 10 в двоичном коде.
Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
числовое значение | двоичный код | |
0 | 000 | |
1 | 001 | |
2 | 010 | |
3 | 011 | |
4 | 100 | |
5 | 101 | |
6 | 110 | |
7 | 111 | |
Отсюда видно, что для числа больше 7 при 3-разрядном коде уже нет кодовых комбинаций из 0 и 1.
Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n . Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0.
Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменяться несколько бит одновременно. Например, число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно, при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно. Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений (толеранцев) при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно. Это, в свою очередь, привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация. Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Код Грея
Код Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. При этом крайний правый разряд сдвинутой комбинации отбрасывается.
Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается.
Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом » Complement «. Выдаваемое значение может быть возврастающим или спадающим при одном и том же физическом направлении вращения оси.
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея — выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
| Десятичный код | Двоичный код | Код Грея |
| 23 22 21 20 | ||
| 0 1 2 3 | 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 | 0 0 0 0 0 0 0 1 0 0 1 1 0 0 1 0 |
| 4 5 6 7 | 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 | 0 1 1 0 0 1 1 1 0 1 0 1 0 1 0 0 |
| 8 9 10 11 | 1 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 | 1 1 0 0 1 1 0 1 1 1 1 1 1 1 1 0 |
| 12 13 14 15 | 1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 | 1 0 1 0 1 0 1 1 1 0 0 1 1 0 0 0 |
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
Используйте такую схему для преобразования Кода Грея в двоичный код.
Примечание:
* Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V.
** Инвертор
*** Исключающее или
Gray-Excess-Code
Обычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещяется на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализируются этим методом. Так 9-ти битный Грей-код равный 512 шагов, урезанный с обеих сторон на 76 шагов будет равен 360°.
Однооборотный энкодер
Однооборотными ( Single — Turn ) датчиками называются датчики, которые выдают абсолютное значения в пределах одного оборота, т.е. в радиусе 360°. После одного оборота код является полностью пройденым и начинается опять с его начального значения. Эти датчики служат, преимущественно, для измерения угла поворота и применяются, например, в антенных системах, эксцентричных коленчатых пресах и т.д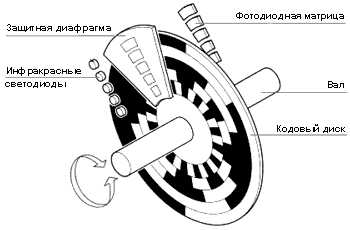
Многооборотный энкодер
Линейные перемещения предполагают необходимым применение измерительной системы с n -количеством оборотов. Например, при линейных приводах или при задачах измерения с помощью зубчатой измерительной штанги, применение однооборотных датчиков является неприемлемым. В этом случае приходят на помощь датчики, где дополнительно к измерению угла поворота в пределах одного оборота также происходит регистрация количества оборотов с помощью дополнительно встроенного передаточного механизма, т.е. своего рода редуктора из нескольких кодовых оптических дисков, образуя, таким образом, многооборотный энкодер ( Multi — Turn ).
Информация предоставлена сайтом www.megasensor.com
avtomatikablog.com
Принцип работы энкодеров
Датчики углового и линейного перемещения, датчики наклона
Инкрементальные энкодеры
Инкрементальный энкодер (Incremental Encoder) регистрирует относительное перемещение (приращение). Разрешение (Resolution) углового энкодера определяется количеством импульсов на один оборот (на рисунке изображён оптический дик с разрешением 8 имп/об).
Частота импульсов на выходе энкодера пропорциональна скорости вращения.
Система управления должна подсчитывать импульсы, чтобы вычислить угол поворота энкодера относительно точки отсчёта.
В системах, работающих с абсолютными координатами (станок с ЧПУ), перед началом работы (после включения питания) необходимо выставить ноль – вывести рабочий орган машины в опорную (реперную) точку и в ней обнулить счётчик импульсов.
Синусно-косинусные инкрементальные датчики положения sin/cos 1-Vss и 1-Vpp
Синусоидальные выходные сигналы А и В сдвинуты друг относительно друга на 90 градусов, что позволяет определять направление вращения. Сигнал нулевой метки R используется для синхронизации с точкой отсчёта. Для повышения помехозащищённости датчик выдаёт ещё три инверсных сигнала: A, B, R. Оцифровываются эти сигналы в системе измерения.
Датчики с интерфейсом 1-Vpp используются в сервосистемах, т.к. как позволяют получать очень высокое разрешение. Так, например, если датчик выдаёт 2048 периодов синусоиды (импульсов) на оборот, а система управления в каждой такой синусоиде различает 2048 дискретных уровней, то общее разрешение датчика составит 2048 х 2048 = 4194304 импульсов на оборот.
Инкрементальные датчики с интерфейсом TTL или HTL
Эти датчики сами оцифровывают синусоидальные сигналы – у них на выходе 6 прямоугольных сигналов — три прямых: A, B, R и три инверсных: A, B, R. Для сигнализации неисправности датчика используется инверсный сигнал помехи (если нет неисправности, то сигнал помехи равен 1).
Абсолютные энкодеры
Разрешение абсолютного энкодера (Absolute Encoder) определяется количеством уникальных кодов на один оборот. Однооборотные (Single-turn) абсолютные энкодеры определяют положение в пределах одного оборота, многооборотные (Multi-turn) – в пределах определённого числа оборотов.
Абсолютные датчики положения не требуют для начала работы выхода в опорную точку – при включении питания датчик сразу определяет координату, сканируя кодовые дорожки.
Резольверы
Резольвер (Resolver) – это аналоговый электромагнитный абсолютный однооборотный датчик, работающий по принципу вращающегося электрического трансформатора.
Рассмотрим работу бесщёточного резольвера.
На статоре расположены три обмотки: первичная обмотка возбуждения вращающегося трансформатора
(на неё подаётся переменное напряжение) и две двухфазные обмотки, механически повёрнутые друг относительно друга
на 90 градусов: синусная и косинусная.
На роторе расположена вторичная обмотка вращающегося трансформатора, которая возбуждается от первичной обмотки
на статоре за счёт электромагнитной индукции. Обмотка ротора в свою очередь индуцирует в синусной обмотке статора
напряжение пропорциональное синусу угла поворота ротора, а в косинусной обмотке — напряжение пропорциональное
косинусу угла поворота ротора.
Резольверы отличаются высокой надёжностью (они не бьются и не запотевают, как оптические) и точностью (аналоговые, а не дискретные).
Код Грея
Код Грея (Gray Code) – это двоичный код, в котором два соседних значения отличаются только одним разрядом.
| Десятичное число | Двоичное число | Код Грея |
|---|---|---|
| 0 | 000 | 000 |
| 1 | 001 | 001 |
| 2 | 010 | 011 |
| 3 | 011 | 010 |
| 4 | 100 | 110 |
| 5 | 101 | 111 |
| 6 | 110 | 101 |
| 7 | 111 | 100 |
Формула побитного преобразования двоичного кода в код Грея
Gi = Bi⊕Bi+1,
биты нумеруются справа налево, ⊕ – исключающее ИЛИ (если биты равны, то результат равен 0; если биты не равны, то результат равен 1).
Код Грея используется для кодирования положений в абсолютных датчиках, так как обладает большей помехозащищённостью, чем обычное двоичное кодирование (Natural Binary).
На рисунке изображён оптический диск с 3-х разрядным (8 положений) кодом Грея.
Тахогенераторы
Тахогенераторы предназначены для определения скорости и направления вращения. Напряжение на выходе тахогенератора пропорционально скорости вращения вала.
www.maxplant.ru
Появление новых интерфейсов энкодеров способно существенно облегчить жизнь проектировщику?
Энкодеры – это датчики положения, которые используются в промышленных электроприводах для получения информации о скорости вращения электродвигателя и о положении вала ротора. С помощью энкодера реализуется обратная связь по скорости или положению электрической машины, которая заводится в систему автоматического управления и используется в алгоритме управления механизмом. Данная связь является костяком системы автоматизированного электропривода.
Много различных интерфейсов связи разрабатывалось для энкодеров на протяжении последних лет. Но выбор интерфейса связи ставит перед разработчиком ряд факторов – экономическая эффективность, точность, безопасность. Решения, описанные в этой статье, пытаются максимально оптимизировать удовлетворение этих требований.
Принцип работы энкодера
Энкодер – это электромеханическое устройство, которое генерируют выходной электрический сигнал пропорциональный скорости вращения вала электрической или механической машины. Существуют линейные и вращающиеся энкодеры. Данная статья рассматривает вращающиеся энкодеры, используемые в связке с электродвигателями. Датчик крепится к валу электрической машины и генерирует электрические сигналы, которые пропорциональны скорости вращения электродвигателя. Энкодер также можно использовать и для определения положения вала машины в пространстве.
Вращающиеся датчики положения бывают двух видов: инкрементальный и абсолютный. Инкрементальные энкодеры обеспечивают импульсный выход в виде прямоугольных импульсов, которые используются для указания скорости вращения вала, а также могут быть использованы для расчета его положения. Большинство энкодеров генерируют две прямоугольные волны, сдвинутые друг относительно друга на 900. Этот сдвиг позволяет определить направление вращения вала. Более того, маркер или индекс обычно генерируется один за оборот, что позволяет создать контрольную точку при подсчете импульсов.
Абсолютные энкодеры параллельно генерируют на выходе двоичный код, который указывает точное положение в один оборот вала. Использование двоичного кода Грея сводит к минимуму ошибки в определении положения. Также абсолютные датчики положения могут вырабатывать сигналы прямоугольной, синусной или косинусной аналоговой формы. Выработанные sin/cos сигналы обеспечивают более точное определение положения.
Вращающиеся энкодеры могут генерировать выходной сигнал несколькими способами: механическим, емкостным, магнитным или оптическим методом. Наиболее распространёнными являются оптические датчики положения, так как они генерируют наиболее точный сигнал. Состоит он из стеклянного диска, на который наносят непрозрачные полоски. На данный диск направлен светодиод, который его освещает, и фотодиод или фототранзистор, принимающий и обрабатывающий световой сигнал светодиода. При вращении пара свето- и фотодиод генерируют импульсы, частота которых пропорциональна скорости вращения вала машины. Эти сигналы преобразуются в последовательный формат для передачи в микроконтроллер, который осуществляет управление механизмом.
Интерфейсы абсолютного энкодера
Ряд последовательных интерфейсов доступен для абсолютных датчиков положения. Большинство из них являются собственностью компаний занимающихся производством энкодеров. На рынке укрепилось несколько наиболее популярных видов интерфейсов, таких как: BiSS, EnDat, HIPERFACE и SSI. Давайте подробней рассмотрим каждый из них.
BiSS
Двунаправленный синхронный последовательный интерфейс (BiSS) был разработан IC-Haus, Германия. Интерфейс использует соединение точка-точка от датчика к контроллеру. Шесть проводных линий находятся в экранированном кабеле: одна дифференциальная пара для тактового сигнала и вторая дифференциальная пара для последовательных данных кодера.
Данные передаются синхронно с тактовым сигналом. Тактовая частота определяется длиной кабеля, который может быть от 10 до 1000 метров. Максимальная тактовая частота составляет 10 Мбит / с на 10 метров. Доступна компенсация задержки для кабеля большой длины.
Интерфейс BiSS, соответствует стандарту TIA / EIA RS-422 и имеет два дополнительных провода источника питания постоянного тока к кодеру. Он аппаратно-совместимым с интерфейсом SSI, который описан ниже.
EnDat
Протокол кодировщик данных является собственностью Heidenhain, Германия. Он реализует соединение точка-точка с восемью проводами. Одна дифференциальная пара для данных, вторая пара для часов, остальные четыре провода используются для питания датчика. Передача данных происходит синхронно с тактовыми импульсами и с тактовой частотой, зависящей от длины кабеля. Максимальная скорость составляет 16 Мбит / с, в то время как типичная скорость на 100 метров составляет 8 Мбит / с. Он использует стандарт интерфейса TIA / EIA RS-485.
HIPERFACE
HIPERFACE DSL (Digital Servo Link) был разработан Max Stegmann GmbH, Германия и SICK, США. Последовательный интерфейс точка-точка использует стандарт в TIA / EIA RS-485. Тем не менее, этот протокол также поддерживает подключение шины из нескольких кодеров.
Интерфейс использует восьмижильный экранированный кабель типа витая пара длиной до 150 метров. Одна дифференциальная пара используется для данных, две пары несут аналоговые сигналы sin / cos, сгенерированные кодером. Sin/cos сигналы оцифровываются 12-разрядными АЦП и используются для обеспечения измерения положения с более высоким разрешением. Две дополнительные линии питают энкодер.
Передача данных производится в асинхронном режиме. В стандартной версии, интерфейс поддерживает скорость передачи данных 38,4 кбод. Другой вариант HIPERFACE может передавать 9,375 Мбод до 100 метров.
Ключевой особенностью этого интерфейса является то, что он может нести сигналы обратной связи в одном кабеле, что исключает необходимость дополнительного кабель. Это делается путем наложения сигналов данных обратной связи на сигнал питания постоянного тока.
SSI
Один из самых старых и оригинальных интерфейсов энкодера представляющий собой синхронный последовательный интерфейс, разработанный в Европе. Он предшествует всем интерфейсам, описанным выше. SSI использует шестижильный кабель с одной парой для данных, одной парой для таймера, и одной парой питания постоянным током. Скорость передачи данных может составлять до 1,5 Мбит / с. Некоторые SSI энкодеры поставляются с sin / cos сигналами над другими двумя парами.
Реализация интерфейса
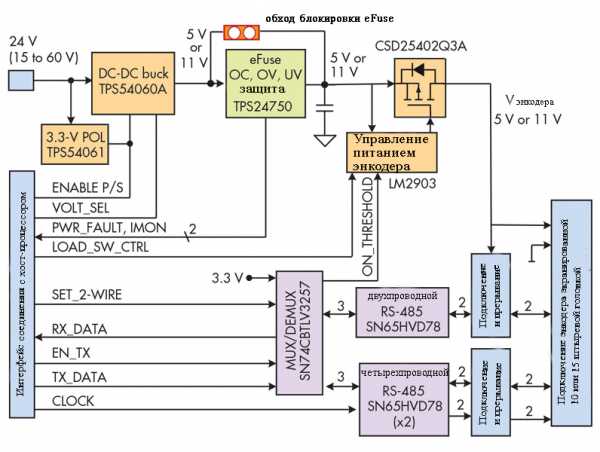
Как разработчик вы можете создать свой собственный интерфейс, основанный на удобных для вас интегральных микросхемах ИС. Однако в случае если у вас нет желания или времени разрабатывать свой собственный интерфейс, для быстрого и простого подключения энкодера вполне подойдет один из интерфейсов компании Texas Instruments. Одним из таких решений является TIDA-00179, который является универсальным интерфейсом и может быть использован с любым из описанных выше интерфейсов.
На первом рисунке показана схема данной системы. Конструкция поддерживает стандартные напряжения питания постоянным током от 15 В до 60 В (как правило, 24 В). Встроенные компоненты питания предназначаются для питания датчика положения напряжениями 5,25 В или 11 В. Также предусмотрена защита от перенапряжений, пониженного напряжения, перегрузки по току и короткого замыкания. Приемопередатчики RS-485 передают и обрабатывают данные, поступающие от датчика вращения. Данная конструкция способна поддерживать вариант исполнения с длиной кабеля до 100 метров.
Другим доступным вариантом является TIDA-00202 для HIPERFACE энкодеров. Подобно Tida-0179, он обеспечивает питания датчика 11 В от номинального входного напряжения 24 В. Также включен приемопередатчик RS-485 для передачи данных. Поддерживается аналоговый выход sin/cos сигнала.
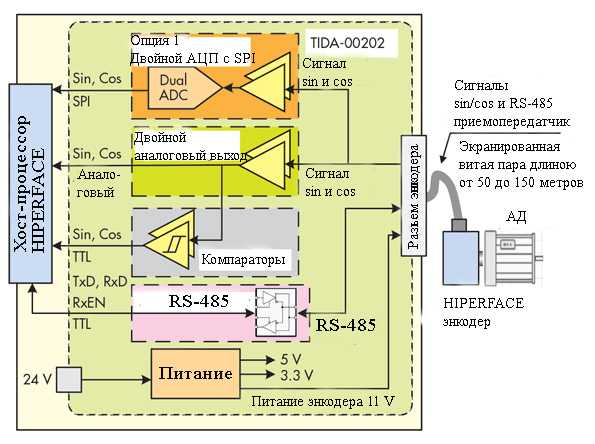
Выходной сигнал обрабатывается тремя путями: один путь это аналоговый сигнал, второй преобразует сигнал в совместимый вариант с транзисторно-транзисторной логикой ТТЛ, третий путь – это оцифровка сигнала двумя 12-битными АЦП в интерфейс SPI с последующей передачей на обработку микроконтроллеру. Данная конструкция поддерживает длины кабелей от 50 до 150 метров. Разновидность этой конструкции является TIDA-00176, который является только интерфейсом для sin / cos энкодеров.
elenergi.ru
